Publications
Publications
|
A multiscale model of terrain dynamics for real-time earthmoving simulation
|
 A multiscale model for real-time simulation of terrain dynamics is explored.
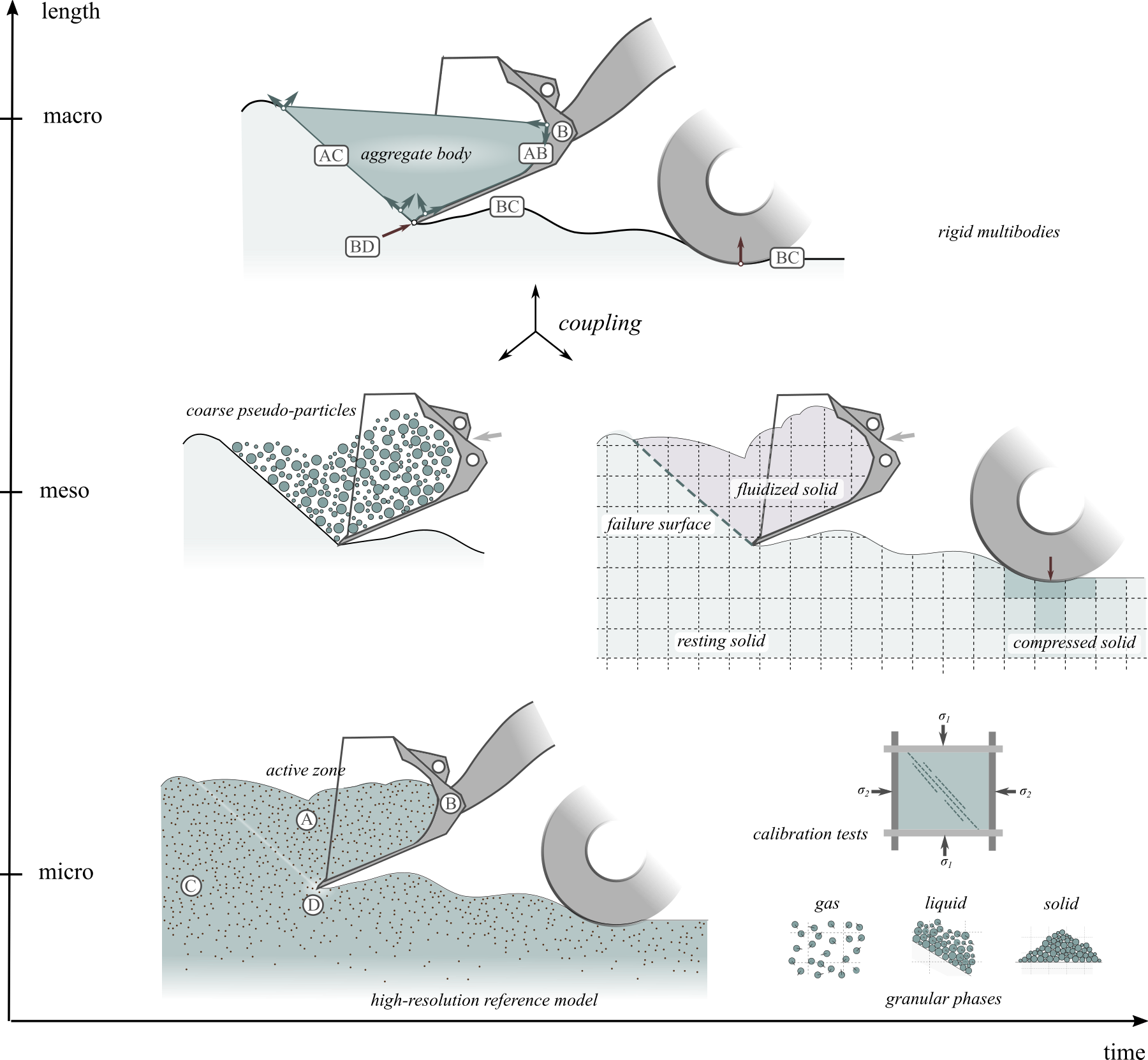
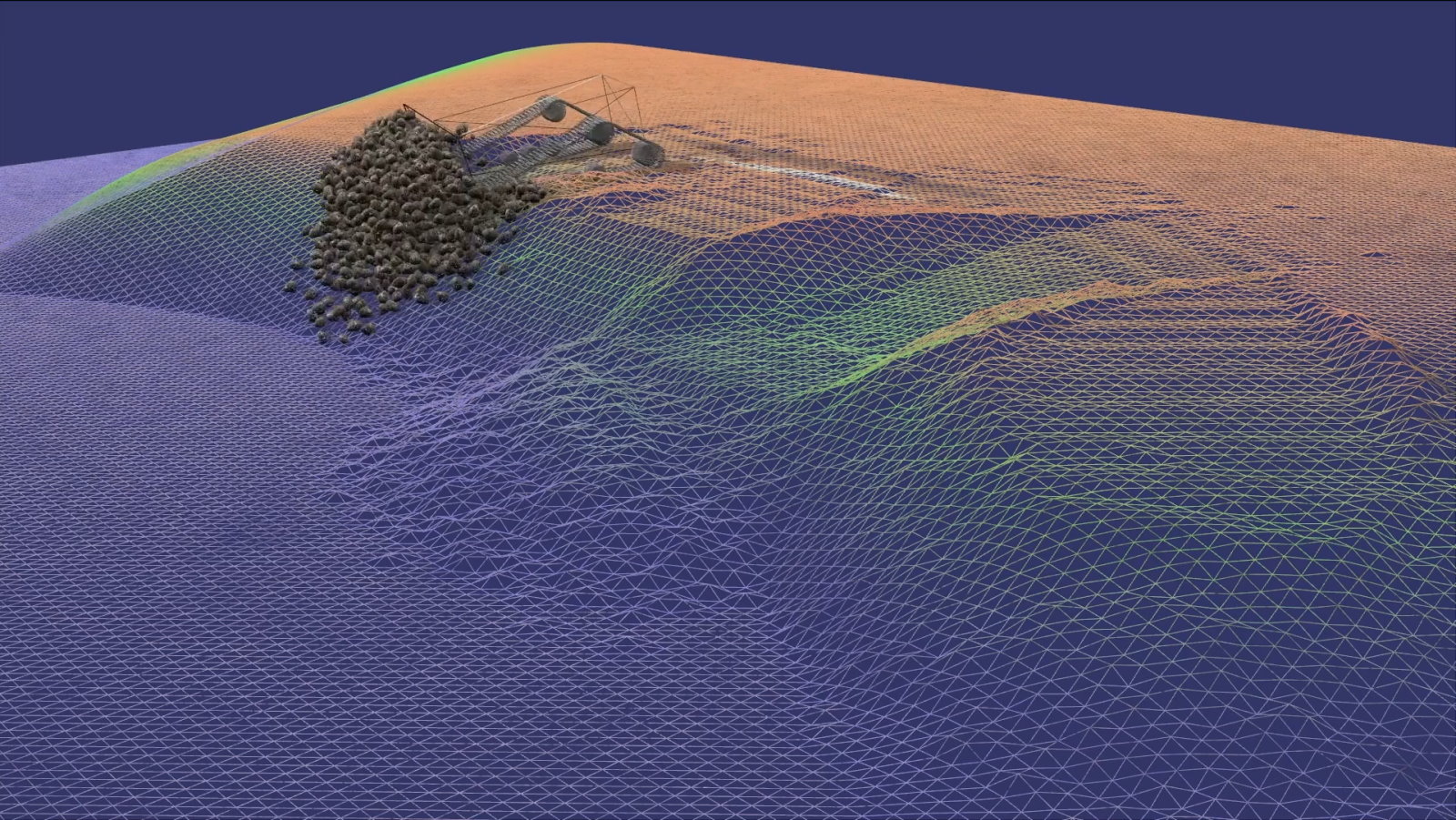
To represent the dynamics on different scales the model combines the description of soil as a continuous solid, as distinct particles and as rigid multibodies.
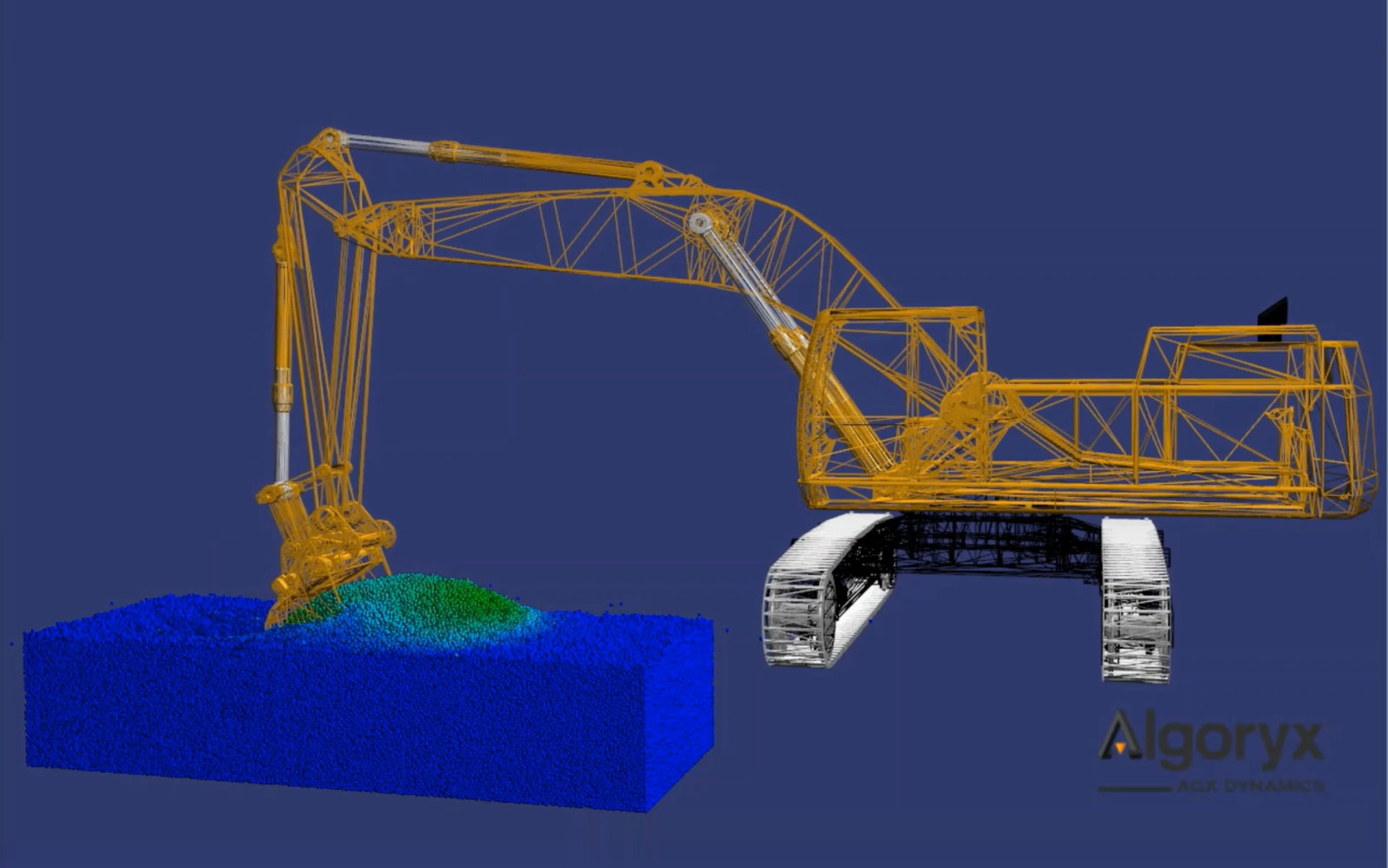
The models are dynamically coupled to each other and to the earthmoving equipment.
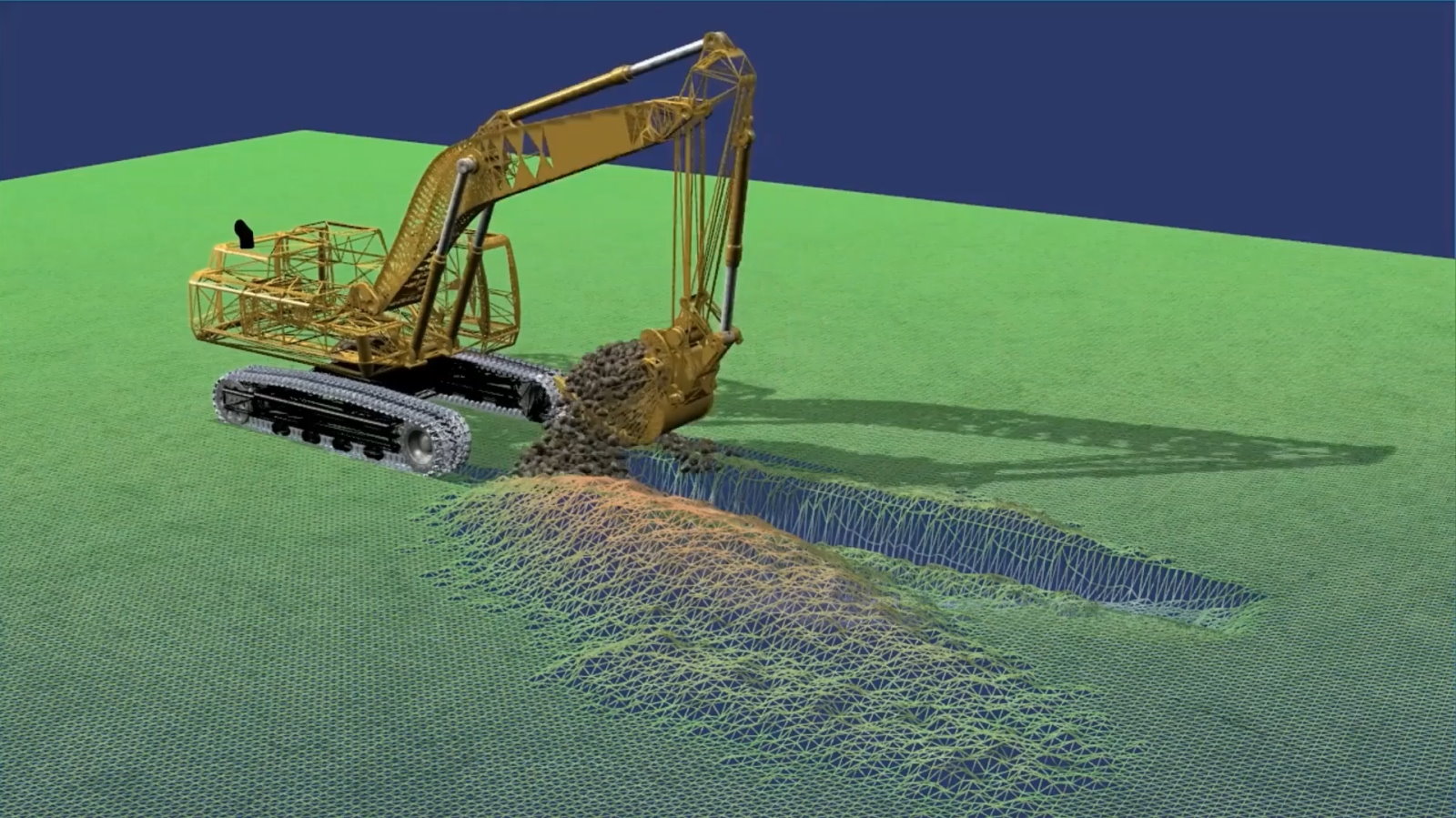
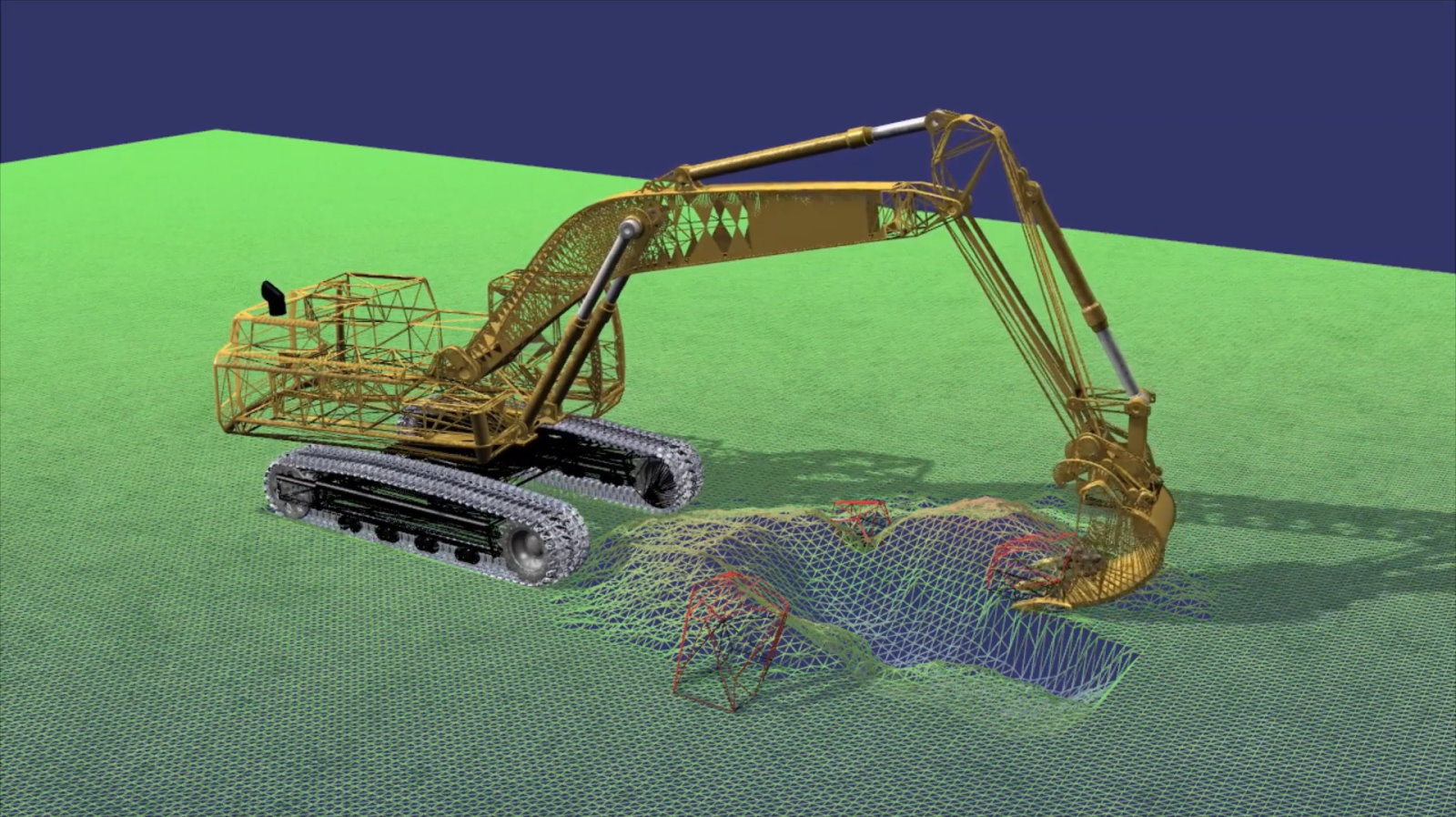
Agitated soil is represented by a hybrid of contacting particles and continuum solid, with the moving equipment and resting soil as geometric boundaries.
Each zone of active soil is aggregated into distinct bodies, with the proper mass, momentum and frictional-cohesive properties,
which constrain the equipment's multibody dynamics.
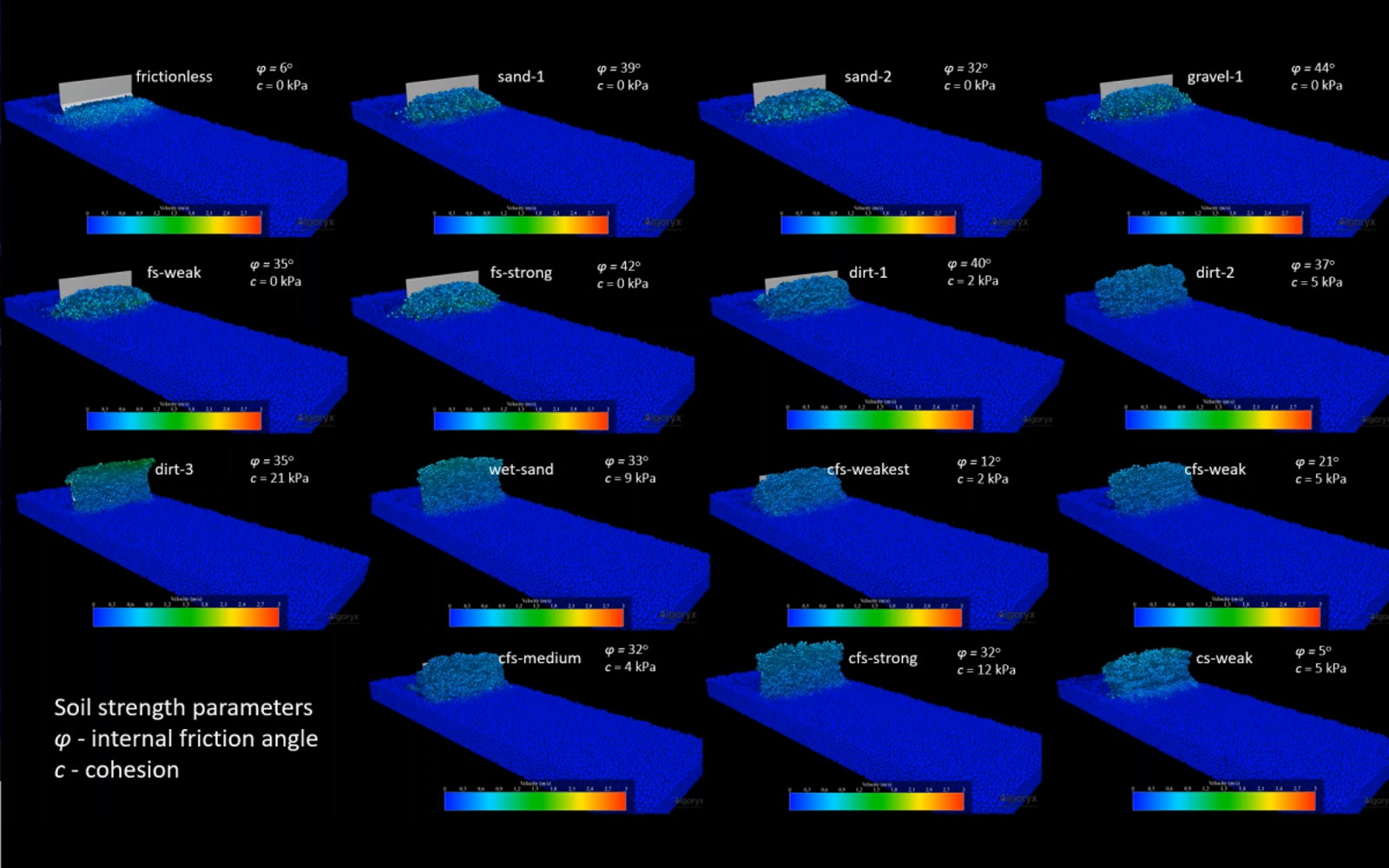
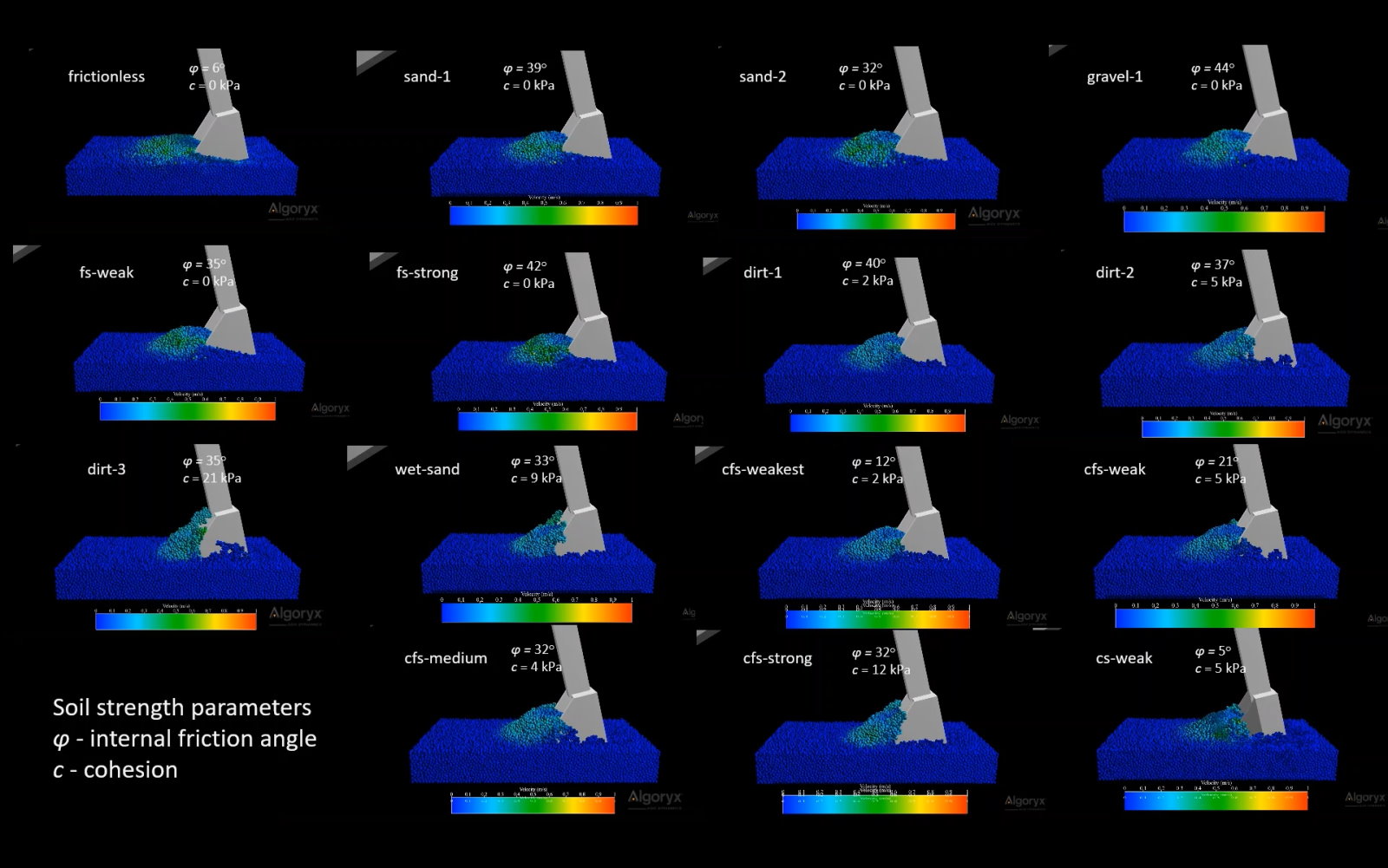
The particle model parameters are pre-calibrated to the bulk mechanical parameters for a wide range of different soils.
The result is a computationally efficient model for earthmoving operations that resolve the motion of the soil, using a fast iterative solver,
and provide realistic forces and dynamic for the equipment, using a direct solver for high numerical precision.
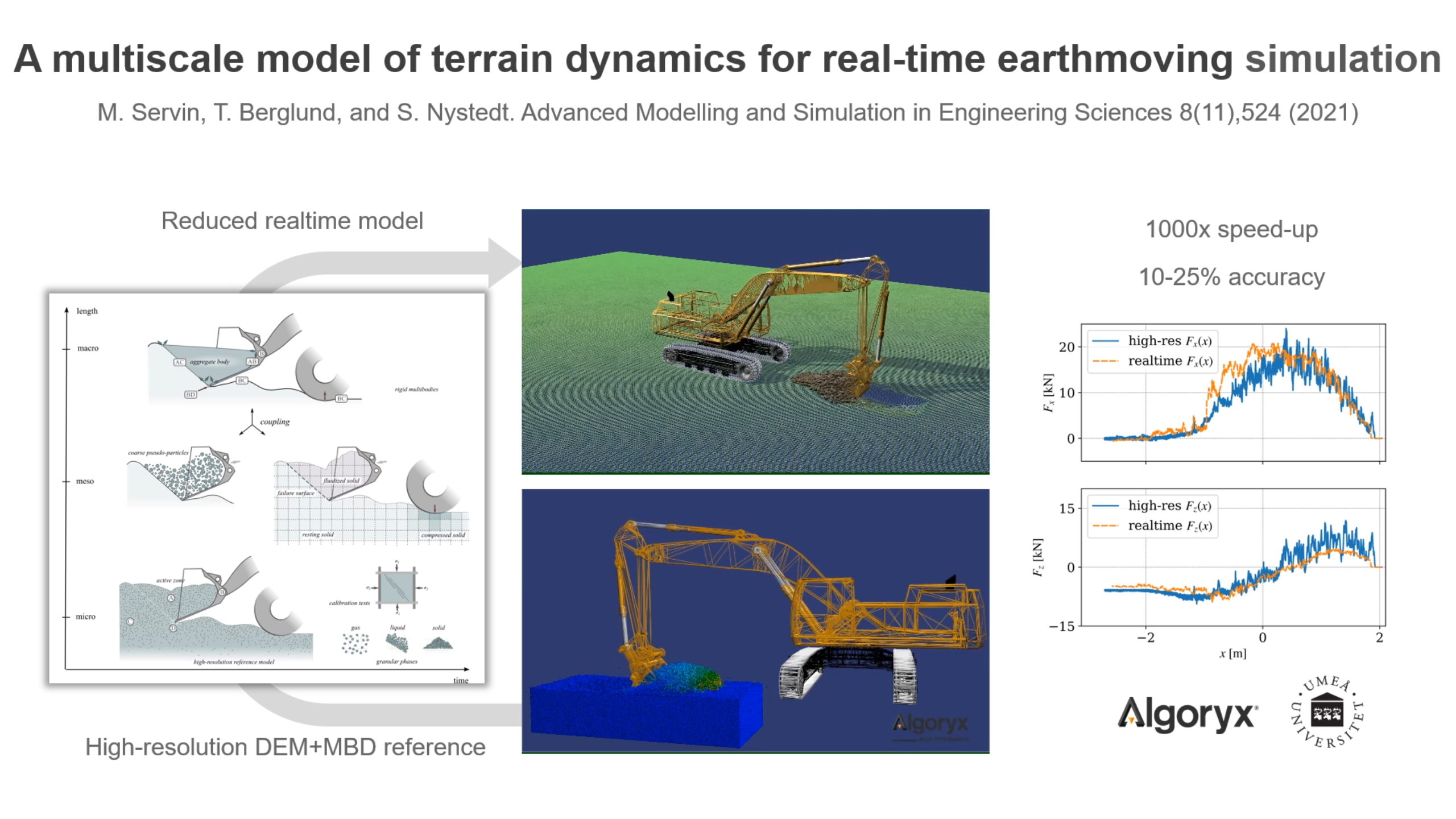
Numerical simulations of excavation and bulldozing operations are performed to validate the model and measure the computational performance.
Reference data is produced using coupled discrete element and multibody dynamics simulations at relatively high resolution.
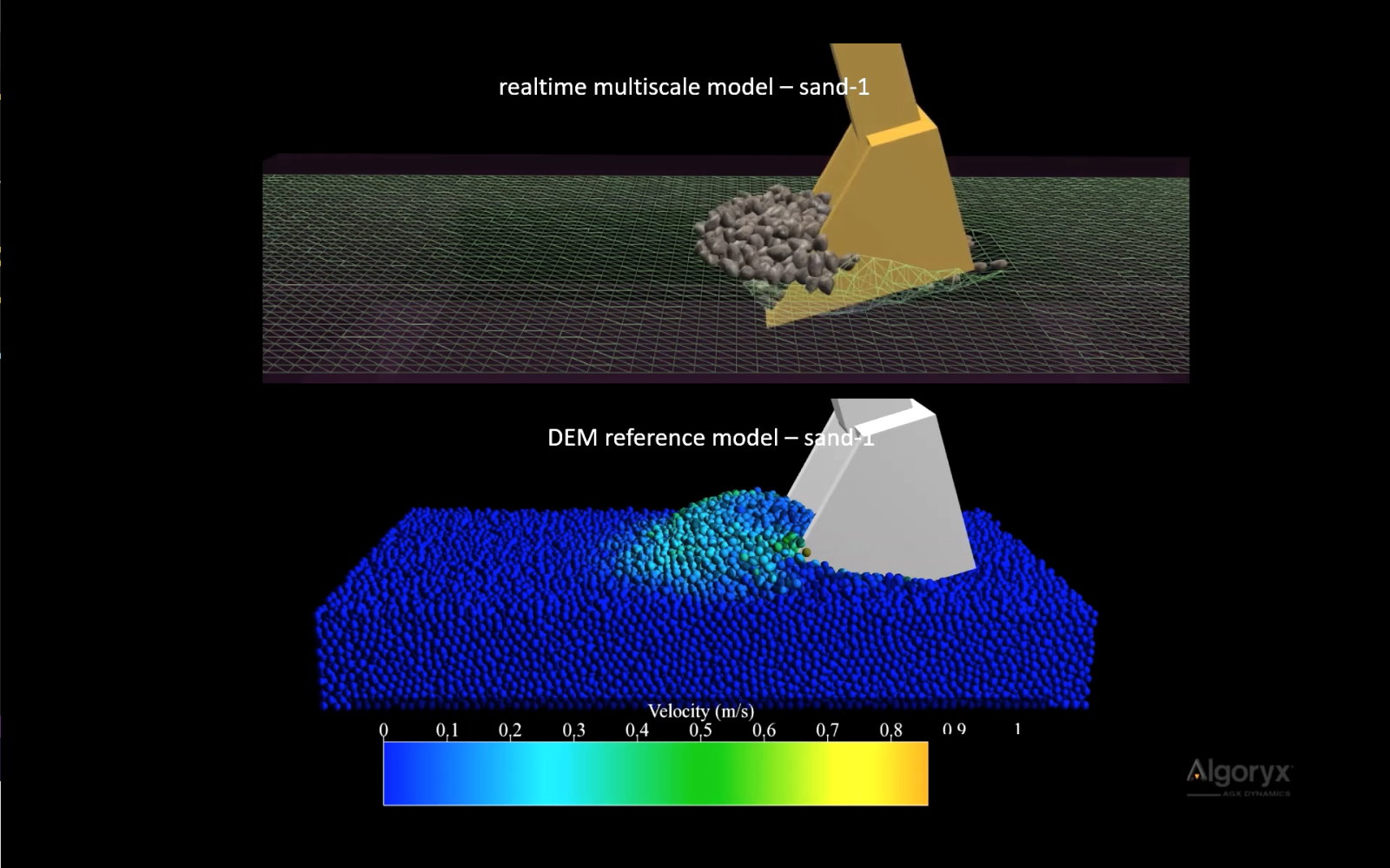
The digging resistance and soil displacements with the real-time multiscale model agree with the reference model up to 10-25%, and run more than three orders of magnitude faster.
A multiscale model for real-time simulation of terrain dynamics is explored.
To represent the dynamics on different scales the model combines the description of soil as a continuous solid, as distinct particles and as rigid multibodies.
The models are dynamically coupled to each other and to the earthmoving equipment.
Agitated soil is represented by a hybrid of contacting particles and continuum solid, with the moving equipment and resting soil as geometric boundaries.
Each zone of active soil is aggregated into distinct bodies, with the proper mass, momentum and frictional-cohesive properties,
which constrain the equipment's multibody dynamics.
The particle model parameters are pre-calibrated to the bulk mechanical parameters for a wide range of different soils.
The result is a computationally efficient model for earthmoving operations that resolve the motion of the soil, using a fast iterative solver,
and provide realistic forces and dynamic for the equipment, using a direct solver for high numerical precision.
Numerical simulations of excavation and bulldozing operations are performed to validate the model and measure the computational performance.
Reference data is produced using coupled discrete element and multibody dynamics simulations at relatively high resolution.
The digging resistance and soil displacements with the real-time multiscale model agree with the reference model up to 10-25%, and run more than three orders of magnitude faster.Video - Paper summary
Video 1 - Bulldozing different soils
Video 2 - Digging in different soils
Video 3 - Bulldozing - realtime versus reference
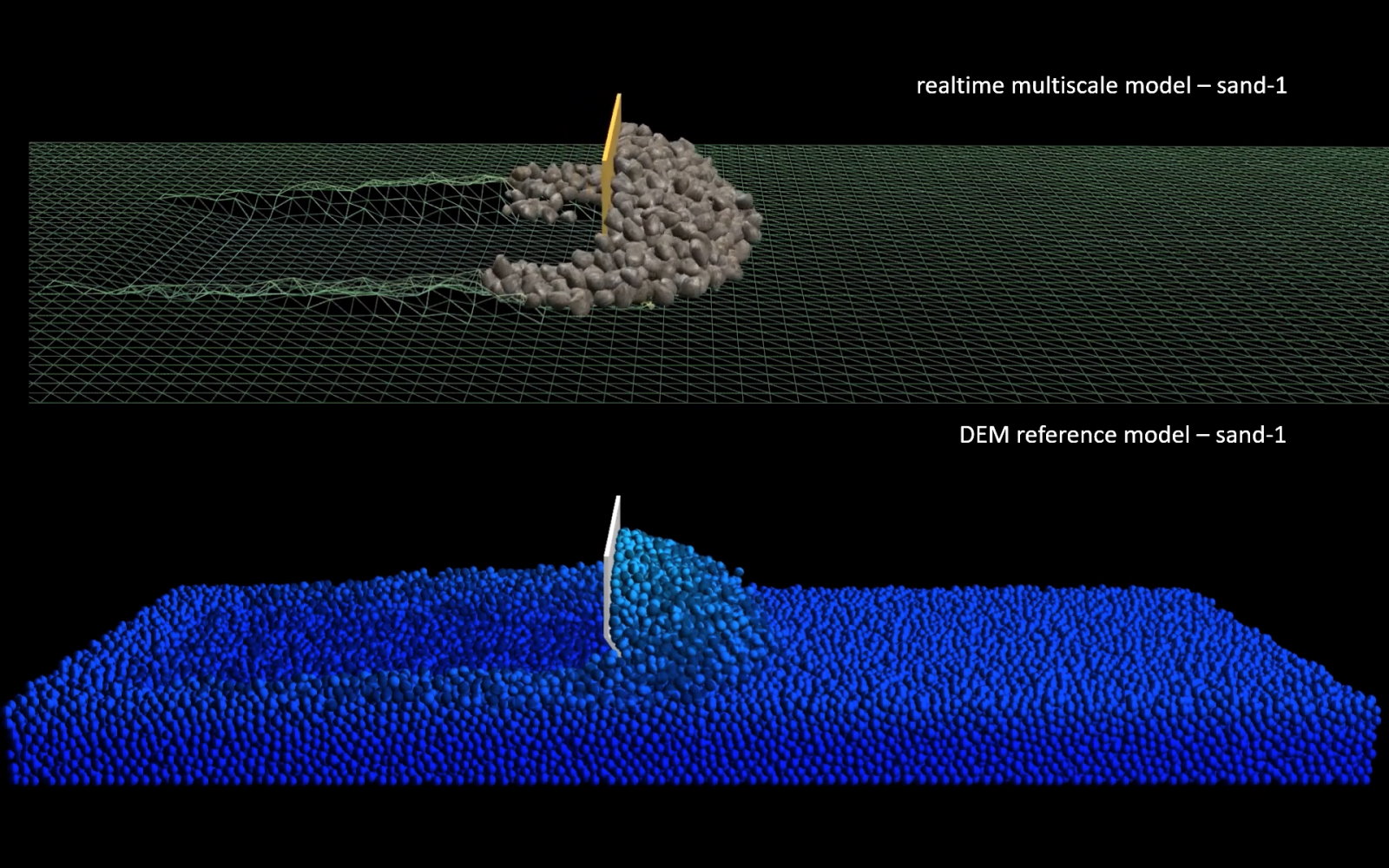
Video 4 - Digging - realtime versus reference
Video 5 - Excavation DEM reference
Video 6 - Wheel loader

Video 7 - Excavator with soil and rocks
Video 8 - Bulldozer
Video 9 - Excavator digging a trench