2016
|
 | Li, Guoyuan; Skogeng, Pedersen Birger; Deng, Yuxiang; Hatledal, Lars Ivar; Zhang, Houxiang: Towards a virtual prototyping framework for ship maneuvering in offshore operations. In: OCEANS 2016-Shanghai, pp. 1–6, IEEE 2016. @inproceedings{li2016towards,
title = {Towards a virtual prototyping framework for ship maneuvering in offshore operations},
author = {Guoyuan Li and Pedersen Birger Skogeng and Yuxiang Deng and Lars Ivar Hatledal and Houxiang Zhang},
url = {https://folk.ntnu.no/gulj/myPaper/2016_li_towards.pdf},
year = {2016},
date = {2016-01-01},
booktitle = {OCEANS 2016-Shanghai},
pages = {1--6},
organization = {IEEE},
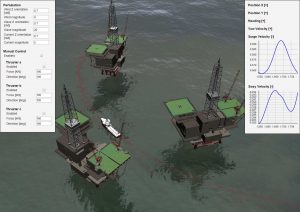
abstract = {This paper presents a virtual prototyping framework that can achieve modeling, simulation and control for ship maneuvering in offshore operations. To fast construct scenario for certain ship maneuvering tasks, a scenario editor is designed to model the ship, the environment disturbances and the scene, respectively. The corresponding scenario containing physical properties is built up in a physics simulation engine AgX. A graphical user interface responsible for visualizing the simulation and plotting data in a real-time manner is developed, in which dynamic interaction including manual control, failure/recover of thrusters and weather change is implemented. Taking advantages of a distributed communication architecture, the plug-in control mechanism is realized to increase the flexibility for evaluating ship maneuvering performance. Through a case study of trajectory tracking, the framework is verified efficient in constructing scenario and testing control model for ship maneuvering applications.},
keywords = {External},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper presents a virtual prototyping framework that can achieve modeling, simulation and control for ship maneuvering in offshore operations. To fast construct scenario for certain ship maneuvering tasks, a scenario editor is designed to model the ship, the environment disturbances and the scene, respectively. The corresponding scenario containing physical properties is built up in a physics simulation engine AgX. A graphical user interface responsible for visualizing the simulation and plotting data in a real-time manner is developed, in which dynamic interaction including manual control, failure/recover of thrusters and weather change is implemented. Taking advantages of a distributed communication architecture, the plug-in control mechanism is realized to increase the flexibility for evaluating ship maneuvering performance. Through a case study of trajectory tracking, the framework is verified efficient in constructing scenario and testing control model for ship maneuvering applications. |
 | Park, Kwang-Phil; Ham, Seung-Ho; Lee, Chan-Young: Application and validation of production planning simulation in shipbuilding. In: Ocean Engineering, vol. 114, pp. 154–167, 2016. @article{park2016application,
title = {Application and validation of production planning simulation in shipbuilding},
author = {Kwang-Phil Park and Seung-Ho Ham and Chan-Young Lee},
doi = {10.1016/j.oceaneng.2016.01.008},
year = {2016},
date = {2016-01-01},
journal = {Ocean Engineering},
volume = {114},
pages = {154--167},
publisher = {Elsevier},
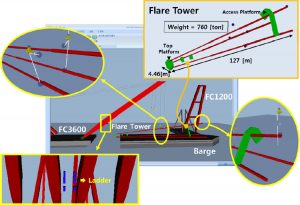
abstract = {As the weight and size of assembly blocks are getting increased, new production procedures by using floating cranes have been proposed to enhance the efficiency in shipyards. In this situation, simulation technology is required to evaluate potential risks of the procedure in advance. By such a necessity, we have developed a simulation system, named SIMSON (SIMulation System Of New production planning). SIMSON calculates the motion of the lifted block and floating bodies such as vessels and floating cranes based on the multibody system dynamics with the hydrostatic and hydrodynamic forces. The calculated motion and wire rope tension are used for dynamic effect estimation. In this paper, we present the application cases of SIMSON to real production process. The simulation results are compared by observing the situation in the real operations. The observation illustrates the simulation results are in harmony with the real situation and the application of SIMSON to production planning simulation in shipyards is quite feasible.},
keywords = {External},
pubstate = {published},
tppubtype = {article}
}
As the weight and size of assembly blocks are getting increased, new production procedures by using floating cranes have been proposed to enhance the efficiency in shipyards. In this situation, simulation technology is required to evaluate potential risks of the procedure in advance. By such a necessity, we have developed a simulation system, named SIMSON (SIMulation System Of New production planning). SIMSON calculates the motion of the lifted block and floating bodies such as vessels and floating cranes based on the multibody system dynamics with the hydrostatic and hydrodynamic forces. The calculated motion and wire rope tension are used for dynamic effect estimation. In this paper, we present the application cases of SIMSON to real production process. The simulation results are compared by observing the situation in the real operations. The observation illustrates the simulation results are in harmony with the real situation and the application of SIMSON to production planning simulation in shipyards is quite feasible. |
2015
|
 | Hatledal, Lars Ivar; Schaathun, Hans Georg; Zhang, Houxiang: A software architecture for simulation and visualisation based on the functional mock-up interface and web technologies. In: Proceedings of The 57th Conference on Simulation and Modelling (SIMS 56): October, 7-9, 2015, Linköping University, Sweden, Linköping University Electronic Press, Linköpings universitet 2015. @inproceedings{hatledal2015software,
title = {A software architecture for simulation and visualisation based on the functional mock-up interface and web technologies},
author = {Lars Ivar Hatledal and Hans Georg Schaathun and Houxiang Zhang},
url = {https://www.researchgate.net/profile/Hans-Georg-Schaathun/publication/300217936_A_Software_Architecture_for_Simulation_and_Visualisation_based_on_the_Functional_Mock-up_Interface_and_Web_Technologies/links/575a9bc108aec91374a603fd/A-Software-Architecture-for-Simulation-and-Visualisation-based-on-the-Functional-Mock-up-Interface-and-Web-Technologies.pdf
},
doi = {10.3384/ecp15119123},
year = {2015},
date = {2015-01-01},
booktitle = {Proceedings of The 57th Conference on Simulation and Modelling (SIMS 56): October, 7-9, 2015, Linköping University, Sweden},
organization = {Linköping University Electronic Press, Linköpings universitet},
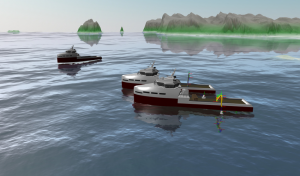
abstract = {This paper presents a software architecture for a collabora-tive virtual environment (CVE) for simulation and visual-isation based on the Functional Mock-up Interface (FMI)for co-simulation and web technologies. FMI has beenchosen in order to have a standardised and independentinterface to models created in different modelling tools.The user interface has been implemented using webtechnologies, which enables a very high degree of flexi-bility. The Web Graphics Library (WebGL) is used for in-teractive 3D visualisations, enabling native cross-platformrendering directly in the browser without the need ofinstalling any additional plug-ins. Employing the bi-directional communication capabilities of the WebSocketprotocol, multiple users can interact with the same simu-lation models simultaneously.A software prototype has been developed in order todemonstrate the applicability of the proposed architecture.As a case study, we have considered virtual prototypingof marine cranes, to illustrate the use on real world prob-lems.},
keywords = {External},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper presents a software architecture for a collabora-tive virtual environment (CVE) for simulation and visual-isation based on the Functional Mock-up Interface (FMI)for co-simulation and web technologies. FMI has beenchosen in order to have a standardised and independentinterface to models created in different modelling tools.The user interface has been implemented using webtechnologies, which enables a very high degree of flexi-bility. The Web Graphics Library (WebGL) is used for in-teractive 3D visualisations, enabling native cross-platformrendering directly in the browser without the need ofinstalling any additional plug-ins. Employing the bi-directional communication capabilities of the WebSocketprotocol, multiple users can interact with the same simu-lation models simultaneously.A software prototype has been developed in order todemonstrate the applicability of the proposed architecture.As a case study, we have considered virtual prototypingof marine cranes, to illustrate the use on real world prob-lems. |
2014
|
 | Metrikin, Ivan: A software framework for simulating stationkeeping of a vessel in discontinuous ice. In: Modeling, Identification and Control 2014, pp. 211–248, Norsk Forening for Automatisering, 2014. @inproceedings{metrikin2014software,
title = {A software framework for simulating stationkeeping of a vessel in discontinuous ice},
author = {Ivan Metrikin},
url = {https://ntnuopen.ntnu.no/ntnu-xmlui/bitstream/handle/11250/2392045/MIC-2014-4-2%2b-%2bMetrikin.pdf?sequence=3&isAllowed=y
http://hdl.handle.net/11250/2392045},
doi = {10.4173/mic.2014.4.2},
year = {2014},
date = {2014-01-01},
booktitle = {Modeling, Identification and Control 2014},
volume = {35},
number = {4},
pages = {211--248},
publisher = {Norsk Forening for Automatisering},
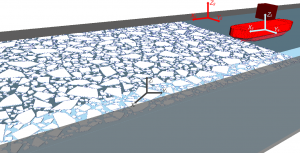
abstract = {This paper describes a numerical package for simulating stationkeeping operations of an offshore vessel in floating sea ice. The software has found broad usage in both academic and industrial projects related to design and operations of floating structures in the Arctic. Interactions with both intact and broken ice conditions can be simulated by the numerical tool, but the main emphasis is placed on modelling managed ice environments relevant for prospective petroleum industry operations in the Arctic. The paper gives a thorough description of the numerical tool from both theoretical and software implementation perspectives. Structural meshing, ice field generation, multibody modelling and ice breaking aspects of the model are presented and discussed. Finally, the main assumptions and limitations of the computational techniques are elucidated and further work directions are suggested.},
keywords = {External},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper describes a numerical package for simulating stationkeeping operations of an offshore vessel in floating sea ice. The software has found broad usage in both academic and industrial projects related to design and operations of floating structures in the Arctic. Interactions with both intact and broken ice conditions can be simulated by the numerical tool, but the main emphasis is placed on modelling managed ice environments relevant for prospective petroleum industry operations in the Arctic. The paper gives a thorough description of the numerical tool from both theoretical and software implementation perspectives. Structural meshing, ice field generation, multibody modelling and ice breaking aspects of the model are presented and discussed. Finally, the main assumptions and limitations of the computational techniques are elucidated and further work directions are suggested. |
2012
|
| Metrikin, Ivan; Lu, Wenjun; Lubbad, Raed; Løset, Sveinung; Kashafutdinov, Marat: Numerical Simulation of a Floater in a Broken-Ice Field: Part I—Model Description. In: International Conference on Offshore Mechanics and Arctic Engineering, pp. 579–588, American Society of Mechanical Engineers 2012. @inproceedings{metrikin2012numerical,
title = {Numerical Simulation of a Floater in a Broken-Ice Field: Part I—Model Description},
author = {Ivan Metrikin and Wenjun Lu and Raed Lubbad and Sveinung Løset and Marat Kashafutdinov},
doi = {10.1115/OMAE2012-83938},
year = {2012},
date = {2012-01-01},
booktitle = {International Conference on Offshore Mechanics and Arctic Engineering},
volume = {44939},
pages = {579--588},
organization = {American Society of Mechanical Engineers},
abstract = {This paper presents a novel concept for simulating the ice-floater interaction process. The concept is based on a mathematical model which emphasizes the station-keeping scenario, i.e. when the relative velocity between the floater and the ice is comparatively small. This means that the model is geared towards such applications as dynamic positioning in ice and ice management.
The concept is based on coupling the rigid multibody simulations with the Finite Element Method (FEM) simulations. The rigid multibody simulation is implemented through a physics engine which is used to model the dynamic behaviour of rigid bodies which undergo large translational and rotational displacements (the floater and the ice floes). The FEM is used to simulate the material behaviour of the ice and the fluid, i.e. the ice breaking and the hydrodynamics of the ice floes. Within this framework, the physics engine is responsible for dynamically detecting the contacts between the objects in the calculation domain, and the FEM software is responsible for calculating the contact forces. The concept is applicable for simulations in a three-dimensional space (3D).
The model described in this paper is divided into two main parts: the mathematical ice model and the mathematical floater model. The mathematical ice model allows modelling both intact level ice and discontinuous ice within a single framework. However, the primary focus of this paper is placed on modelling the broken ice conditions. A floater is modelled as a rigid body with 6 degrees of freedom, i.e. no deformations of the floater’s hull are allowed. Nevertheless, the hydrodynamics of the floater and the ice is considered within the outlined model.
The presented approach allows implementing realistic, high fidelity 3D simulations of the ice-fluid-structure interaction process.},
keywords = {External},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper presents a novel concept for simulating the ice-floater interaction process. The concept is based on a mathematical model which emphasizes the station-keeping scenario, i.e. when the relative velocity between the floater and the ice is comparatively small. This means that the model is geared towards such applications as dynamic positioning in ice and ice management.
The concept is based on coupling the rigid multibody simulations with the Finite Element Method (FEM) simulations. The rigid multibody simulation is implemented through a physics engine which is used to model the dynamic behaviour of rigid bodies which undergo large translational and rotational displacements (the floater and the ice floes). The FEM is used to simulate the material behaviour of the ice and the fluid, i.e. the ice breaking and the hydrodynamics of the ice floes. Within this framework, the physics engine is responsible for dynamically detecting the contacts between the objects in the calculation domain, and the FEM software is responsible for calculating the contact forces. The concept is applicable for simulations in a three-dimensional space (3D).
The model described in this paper is divided into two main parts: the mathematical ice model and the mathematical floater model. The mathematical ice model allows modelling both intact level ice and discontinuous ice within a single framework. However, the primary focus of this paper is placed on modelling the broken ice conditions. A floater is modelled as a rigid body with 6 degrees of freedom, i.e. no deformations of the floater’s hull are allowed. Nevertheless, the hydrodynamics of the floater and the ice is considered within the outlined model.
The presented approach allows implementing realistic, high fidelity 3D simulations of the ice-fluid-structure interaction process. |
| Metrikin, Ivan; Borzov, Andrey; Lubbad, Raed; Løset, Sveinung: Numerical simulation of a floater in a broken-ice field: Part II—Comparative study of physics engines. In: International Conference on Offshore Mechanics and Arctic Engineering, pp. 477–486, American Society of Mechanical Engineers 2012. @inproceedings{metrikin2012numericalb,
title = {Numerical simulation of a floater in a broken-ice field: Part II—Comparative study of physics engines},
author = {Ivan Metrikin and Andrey Borzov and Raed Lubbad and Sveinung Løset},
doi = {10.1115/OMAE2012-83430},
year = {2012},
date = {2012-01-01},
booktitle = {International Conference on Offshore Mechanics and Arctic Engineering},
volume = {44939},
pages = {477--486},
organization = {American Society of Mechanical Engineers},
abstract = {Numerical simulation of a floater in ice-infested waters can be performed using a physics engine. This software can dynamically detect contacts and calculate the contact forces in a three-dimensional space among various irregularly shaped bodies, e.g. the floater and the ice floes. Previously, various physics engines were successfully applied to simulate floaters in ice. However, limited attention was paid to the criteria for selecting a particular engine for the simulation of a floater in broken-ice conditions.
In this paper, four publicly available physics engines (AgX Multiphysics, Open Dynamics Engine, PhysX and Vortex) are compared in terms of integration performance and contact detection accuracy. These two aspects are assumed to be the most important for simulating a floater in broken ice. Furthermore, the access to code, documentation quality and the level of technical support are evaluated and discussed. The main conclusion is that each physics engine has its own strength and weaknesses and none of the engines is perfect. These strength and weaknesses are revealed and discussed in the paper.},
keywords = {External},
pubstate = {published},
tppubtype = {inproceedings}
}
Numerical simulation of a floater in ice-infested waters can be performed using a physics engine. This software can dynamically detect contacts and calculate the contact forces in a three-dimensional space among various irregularly shaped bodies, e.g. the floater and the ice floes. Previously, various physics engines were successfully applied to simulate floaters in ice. However, limited attention was paid to the criteria for selecting a particular engine for the simulation of a floater in broken-ice conditions.
In this paper, four publicly available physics engines (AgX Multiphysics, Open Dynamics Engine, PhysX and Vortex) are compared in terms of integration performance and contact detection accuracy. These two aspects are assumed to be the most important for simulating a floater in broken ice. Furthermore, the access to code, documentation quality and the level of technical support are evaluated and discussed. The main conclusion is that each physics engine has its own strength and weaknesses and none of the engines is perfect. These strength and weaknesses are revealed and discussed in the paper. |
2011
|
 | Wan, Yijun: Discrete element method in granular material simulations. 2011. @mastersthesis{wan2011discrete,
title = {Discrete element method in granular material simulations},
author = {Yijun Wan},
url = {https://pure.tue.nl/ws/portalfiles/portal/47015912/716753-1.pdf},
year = {2011},
date = {2011-01-01},
journal = {Institute of Fraunhofer ITWM Kaiserslautern/Technical University of Kaiserslautern},
abstract = {This thesis describes the theories and simulations of granular material using discrete element method. With wide applications in agriculture and mechanical engineering, granular material exhibits a number of unique physical properties. The understanding of such properties is important in order to evaluate the performance of existing methodologies and to trigger the development of new models for different functionalities in the future. As a microscopic approach, discrete element method has been proved to be adequate in most simulations of granular material. An elaborated description is provided to illustrate a three-phase scheme from the fundamental discrete element model, which includes contact detection, force interaction and time integration. Additional to the conventional scheme, we present a bonding model with a connecting rod between each pair of contacted particles. Two enhanced bonding models are discussed in detail, with special characteristics in accordance with brittle and crack propagation features, respectively. On the contrary, continuum mechanical models give a macroscopic view to investigate granular material behaviors. Difficulties arise from the solving of a complex system of partial differential equations and the connections between model parameters and phenomenological ones. Moreover, triaxial test, uniaxial compression test and blade test are chosen as three representative experiments in granular material study. Simulation results implementing discrete element method are analyzed and discussed regarding the role of different parameters. By carefully choosing models and adjusting parameters, simulation results can have a good quantitative agreement with laboratory measurements. One of our kernel concerns is the computational complexity. Therefore, we focus on exploring effective simplified models with fewer variables.},
keywords = {External},
pubstate = {published},
tppubtype = {mastersthesis}
}
This thesis describes the theories and simulations of granular material using discrete element method. With wide applications in agriculture and mechanical engineering, granular material exhibits a number of unique physical properties. The understanding of such properties is important in order to evaluate the performance of existing methodologies and to trigger the development of new models for different functionalities in the future. As a microscopic approach, discrete element method has been proved to be adequate in most simulations of granular material. An elaborated description is provided to illustrate a three-phase scheme from the fundamental discrete element model, which includes contact detection, force interaction and time integration. Additional to the conventional scheme, we present a bonding model with a connecting rod between each pair of contacted particles. Two enhanced bonding models are discussed in detail, with special characteristics in accordance with brittle and crack propagation features, respectively. On the contrary, continuum mechanical models give a macroscopic view to investigate granular material behaviors. Difficulties arise from the solving of a complex system of partial differential equations and the connections between model parameters and phenomenological ones. Moreover, triaxial test, uniaxial compression test and blade test are chosen as three representative experiments in granular material study. Simulation results implementing discrete element method are analyzed and discussed regarding the role of different parameters. By carefully choosing models and adjusting parameters, simulation results can have a good quantitative agreement with laboratory measurements. One of our kernel concerns is the computational complexity. Therefore, we focus on exploring effective simplified models with fewer variables. |
