2026
|
 | Kamezaki, Mitsuhiro; Katano, Takahiro; Sugano, Shigeki: Virtual-to-Real Motion Adaptation Using Genetic Algorithm for Multi-DOF Disaster Response Robots. In: IEEE Access, vol. 14, pp. 23971 - 23982, 2026. @article{nokey,
title = {Virtual-to-Real Motion Adaptation Using Genetic Algorithm for Multi-DOF Disaster Response Robots},
author = {Mitsuhiro Kamezaki and Takahiro Katano and Shigeki Sugano},
url = {https://ieeexplore.ieee.org/abstract/document/11389778},
doi = {10.1109/ACCESS.2026.3663368},
year = {2026},
date = {2026-02-10},
urldate = {2026-02-10},
journal = {IEEE Access},
volume = {14},
pages = {23971 - 23982},
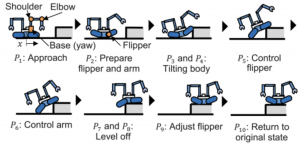
abstract = {For disaster response robots to work safely and effectively, it is crucial to assess task executability before execution, as failures or accidents, such as rollovers, at disaster sites could cause secondary disasters. Thus, motion learning through trial and error in such environments is unacceptable. Moreover, disaster sites are highly diverse and unpredictable, making traditional pre-installed control methods ineffective due to surface slippage and unstable terrain. In this study, we propose an environment-adaptability enhancement system that enables efficient motion learning in a virtual space for multi-degree-of-freedom disaster response robots. The process begins with the robot using a depth sensor to recognize the real environment and then reconstructs it in a virtual space. The robot subsequently attempts to complete the assigned task and calculates its confidence level in successful execution. If the task fails, the robot uses a genetic algorithm to efficiently optimize control parameters using multiple virtual robots. Finally, the learned control method is applied to the real environment. Experiments verified the robot’s ability to adaptively climb higher, uneven, and slippery steps using parameters designed for standard step climbing. The results showed that the proposed system can assess task executability via confidence levels, learn viable motions in a virtual space, and successfully perform adaptive step climbing in the real-world settings.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
For disaster response robots to work safely and effectively, it is crucial to assess task executability before execution, as failures or accidents, such as rollovers, at disaster sites could cause secondary disasters. Thus, motion learning through trial and error in such environments is unacceptable. Moreover, disaster sites are highly diverse and unpredictable, making traditional pre-installed control methods ineffective due to surface slippage and unstable terrain. In this study, we propose an environment-adaptability enhancement system that enables efficient motion learning in a virtual space for multi-degree-of-freedom disaster response robots. The process begins with the robot using a depth sensor to recognize the real environment and then reconstructs it in a virtual space. The robot subsequently attempts to complete the assigned task and calculates its confidence level in successful execution. If the task fails, the robot uses a genetic algorithm to efficiently optimize control parameters using multiple virtual robots. Finally, the learned control method is applied to the real environment. Experiments verified the robot’s ability to adaptively climb higher, uneven, and slippery steps using parameters designed for standard step climbing. The results showed that the proposed system can assess task executability via confidence levels, learn viable motions in a virtual space, and successfully perform adaptive step climbing in the real-world settings. |
 | Pinin, Egor: Framework for Calibrating Bowl Feeders . Umeå University, 2026. @bachelorthesis{nokey,
title = {Framework for Calibrating Bowl Feeders },
author = {Egor Pinin},
url = {http://www.diva-portal.org/smash/record.jsf?pid=diva2%3A2034829&dswid=1399},
year = {2026},
date = {2026-02-03},
urldate = {2026-02-03},
school = {Umeå University},
keywords = {},
pubstate = {published},
tppubtype = {bachelorthesis}
}
|
 | Haas, Meridian; Abdolmohammadi, Armin; Nazari, Shima: Combined Control and Design Optimization of a Parallel Electric-Hydraulic Hybrid Wheel Loader to Prolong Battery Lifetime. In: IEEE Transactions on Transportation Electrification, 2026. @article{nokey,
title = {Combined Control and Design Optimization of a Parallel Electric-Hydraulic Hybrid Wheel Loader to Prolong Battery Lifetime},
author = {Meridian Haas and Armin Abdolmohammadi and Shima Nazari},
doi = {10.1109/TTE.2026.3661362},
year = {2026},
date = {2026-02-02},
urldate = {2026-02-02},
journal = {IEEE Transactions on Transportation Electrification},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
 | Liu, Yihan; Heikkilä, Rauno: Multiagent Path Planning With Neural Obstacle Avoidance for Autonomous Heavy Trucks. In: Journal of Advanced Transportation, vol. 1, 2026. @article{Heikkila2026,
title = {Multiagent Path Planning With Neural Obstacle Avoidance for Autonomous Heavy Trucks},
author = {Yihan Liu AND Rauno Heikkilä},
url = {https://www.proquest.com/openview/1ac1a0d7e25324904d1ddf79bb2cc09a/1?pq-origsite=gscholar&cbl=1006382},
doi = {10.1155/atr/3196768},
year = {2026},
date = {2026-01-23},
urldate = {2026-01-23},
journal = {Journal of Advanced Transportation},
volume = {1},
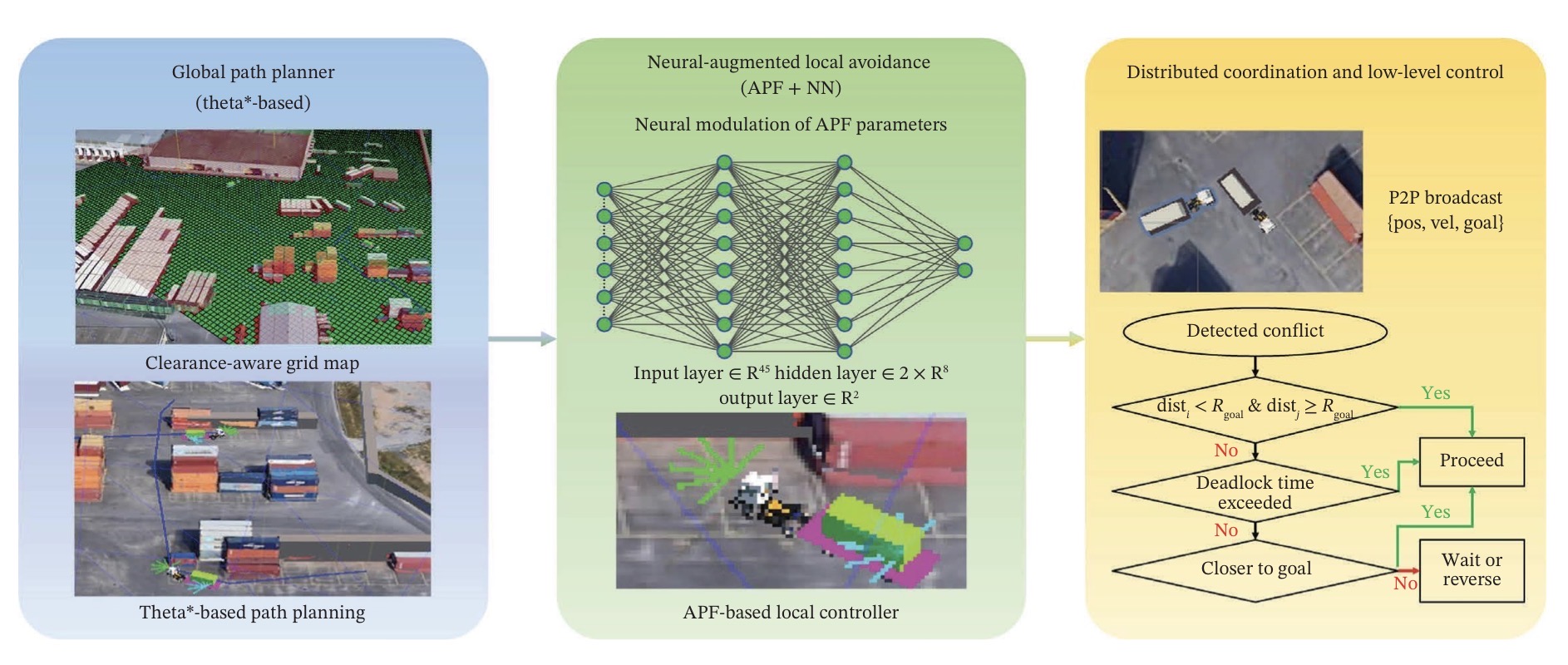
abstract = {Autonomous trucks in busy port terminals must navigate narrow aisles, tight corners, and frequent interactions with multiple
vehicles while maintaining both safety and efciency. This paper presents a hierarchical multiagent navigation framework that
integrates an enhanced grid-based Theta∗ global planner with obstacle infation and clearance-aware costs, an artifcial potential
feld (APF)–based local controller augmented by lightweight neural correction, and a simple coordination protocol for resolving
intertruck conficts. We evaluate the approach in a high-fdelity Unity digital twin of the Port of Oulu using two trafc scenes with
three trucks executing simultaneous tasks. Experiments are repeated under identical initial conditions with independent random
perturbations to capture run-to-run variability, and results are reported as the mean± standard deviation. We compare the
proposed Theta∗-based planner with a standard grid-based A∗ baseline and an 8-neighborhood A∗ variant under the same oc-
cupancygrid,obstacleinfation,andcurvatureconstraintstoisolatetheimpactofexpandedactionsetswithintheA∗framework.A
greedy heuristic baseline is also included in the simpler scene, where it can complete scheduling. Across trucks, Theta∗ achieves
43.0% lower travel time and 39.4% fewer avoidance events than A∗ in the dense-yard scene and 59.5% lower travel time and 91.4%
fewer avoidance events in the gate–yard scene, while also improving a combined tracking-accuracy index by 22.1% and 12.7%,
respectively. Path-tracking evaluation shows stable mean errors (average mean lateral deviation ≈0.40 m and mean heading
error≈1.69° across trucks), with transient peaks mainly occurring at high-curvature segments, narrow-clearance passages, and
interaction-driven maneuvers. We further include a time-bounded scalability study by increasing the local feet size to assess the
coordination overhead under denser intertruck interactions. These results indicate that clearance-aware any-angle planning,
together with neural-tuned local avoidance and lightweight coordination, can improve both efciency and execution quality for
port–yard truck autonomy.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Autonomous trucks in busy port terminals must navigate narrow aisles, tight corners, and frequent interactions with multiple
vehicles while maintaining both safety and efciency. This paper presents a hierarchical multiagent navigation framework that
integrates an enhanced grid-based Theta∗ global planner with obstacle infation and clearance-aware costs, an artifcial potential
feld (APF)–based local controller augmented by lightweight neural correction, and a simple coordination protocol for resolving
intertruck conficts. We evaluate the approach in a high-fdelity Unity digital twin of the Port of Oulu using two trafc scenes with
three trucks executing simultaneous tasks. Experiments are repeated under identical initial conditions with independent random
perturbations to capture run-to-run variability, and results are reported as the mean± standard deviation. We compare the
proposed Theta∗-based planner with a standard grid-based A∗ baseline and an 8-neighborhood A∗ variant under the same oc-
cupancygrid,obstacleinfation,andcurvatureconstraintstoisolatetheimpactofexpandedactionsetswithintheA∗framework.A
greedy heuristic baseline is also included in the simpler scene, where it can complete scheduling. Across trucks, Theta∗ achieves
43.0% lower travel time and 39.4% fewer avoidance events than A∗ in the dense-yard scene and 59.5% lower travel time and 91.4%
fewer avoidance events in the gate–yard scene, while also improving a combined tracking-accuracy index by 22.1% and 12.7%,
respectively. Path-tracking evaluation shows stable mean errors (average mean lateral deviation ≈0.40 m and mean heading
error≈1.69° across trucks), with transient peaks mainly occurring at high-curvature segments, narrow-clearance passages, and
interaction-driven maneuvers. We further include a time-bounded scalability study by increasing the local feet size to assess the
coordination overhead under denser intertruck interactions. These results indicate that clearance-aware any-angle planning,
together with neural-tuned local avoidance and lightweight coordination, can improve both efciency and execution quality for
port–yard truck autonomy. |
 | Abrahamsson, Omar: Humanoid Locomotion AcrossSurface Material Variations. Umeå University, 2026. @mastersthesis{nokey,
title = {Humanoid Locomotion AcrossSurface Material Variations},
author = {Omar Abrahamsson},
url = {https://umu.diva-portal.org/smash/record.jsf?pid=diva2%3A2016151&dswid=-4392
https://www.diva-portal.org/smash/get/diva2:2016151/FULLTEXT03.pdf},
year = {2026},
date = {2026-01-22},
urldate = {2026-01-22},
school = {Umeå University},
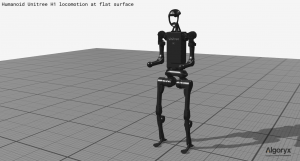
abstract = {This thesis investigates the integration of a reinforcement learning policy with a low-level controller to enable humanoid locomotion of the Unitree H1 robot in AGX Dynamics, a high fidelity physics engine designed for real-time simulation of stiff and non-smooth multi-body systems. Using an AMD Threadripper CPU with 96 cores, we were able to run 180 simulation threads in parallel. The results showed that the humanoid robot could walk and turn in multiple directions at varying speeds through keyboard teleoperation. A key focus of this work is the comparison of two policy models: an urban walking policy trained on solid ground with high friction, and an off-road walking policy trained on a soft, sticky, and slippery surface. These models were evaluated across surfaces of different materials in terms of mechanical energy dissipation. The results indicate that although the off-road policy generalizes better to complex terrains, it consumes significantly more energy compared to the urban walking policy, which demonstrates greater energy efficiency. This study suggests several directions for future work. One extension is to train a whole-body locomotion policy (19 DOF) by combining dynamic mechanisms with curriculum learning, enabling adaptive control of base height, foot clearance, joint coordination, and upper-body motion across increasing velocity ranges. Additionally, energy dissipation analysis can be extended by leveraging AGX Dynamics’ energy management tools to estimate total energy loss over time and evaluate task duration before battery depletion.},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
This thesis investigates the integration of a reinforcement learning policy with a low-level controller to enable humanoid locomotion of the Unitree H1 robot in AGX Dynamics, a high fidelity physics engine designed for real-time simulation of stiff and non-smooth multi-body systems. Using an AMD Threadripper CPU with 96 cores, we were able to run 180 simulation threads in parallel. The results showed that the humanoid robot could walk and turn in multiple directions at varying speeds through keyboard teleoperation. A key focus of this work is the comparison of two policy models: an urban walking policy trained on solid ground with high friction, and an off-road walking policy trained on a soft, sticky, and slippery surface. These models were evaluated across surfaces of different materials in terms of mechanical energy dissipation. The results indicate that although the off-road policy generalizes better to complex terrains, it consumes significantly more energy compared to the urban walking policy, which demonstrates greater energy efficiency. This study suggests several directions for future work. One extension is to train a whole-body locomotion policy (19 DOF) by combining dynamic mechanisms with curriculum learning, enabling adaptive control of base height, foot clearance, joint coordination, and upper-body motion across increasing velocity ranges. Additionally, energy dissipation analysis can be extended by leveraging AGX Dynamics’ energy management tools to estimate total energy loss over time and evaluate task duration before battery depletion. |
 | Karanfil, Deniz; Ravani, Bahram: Scaling digital models. In: Scientific Reports, vol. 16, pp. 5962, 2026. @article{nokey,
title = {Scaling digital models},
author = {Deniz Karanfil and Bahram Ravani},
doi = {https://doi.org/10.1038/s41598-026-36310-x},
year = {2026},
date = {2026-01-21},
urldate = {2026-01-21},
journal = {Scientific Reports},
volume = {16},
pages = {5962},
abstract = {The development of accurate digital models (DMs) for physical systems requires virtual representations that faithfully capture the underlying physics of the system or equipment being represented. Physics-based DMs provide reliable predictions only when accurate mathematical models of physical systems exist. When such models are incomplete or uncertain, experimental calibration can significantly improve model fidelity. However, in industries where systems or equipment exist in multiple sizes or configurations, performing experimental calibration for each variant can be prohibitively expensive and time-consuming. To address this challenge, this paper introduces a novel methodology and modular computational framework that leverages machine learning (ML) and dimensional analysis (DA) to enable scaling of DMs. The proposed approach allows calibration to be performed on a single representative system, with results scaled to other system sizes, whether from full-scale to reduced-scale prototypes or vice versa. Traditional applications of DA in this context often encounter difficulties due to distorted scaling factors. This work resolves these challenges by developing a consistent scaling framework tailored for DMs. The methodology is demonstrated by a case study in which a calibrated DM of a wheel loader is scaled between an industrial-size system and a miniaturized laboratory system.
},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
The development of accurate digital models (DMs) for physical systems requires virtual representations that faithfully capture the underlying physics of the system or equipment being represented. Physics-based DMs provide reliable predictions only when accurate mathematical models of physical systems exist. When such models are incomplete or uncertain, experimental calibration can significantly improve model fidelity. However, in industries where systems or equipment exist in multiple sizes or configurations, performing experimental calibration for each variant can be prohibitively expensive and time-consuming. To address this challenge, this paper introduces a novel methodology and modular computational framework that leverages machine learning (ML) and dimensional analysis (DA) to enable scaling of DMs. The proposed approach allows calibration to be performed on a single representative system, with results scaled to other system sizes, whether from full-scale to reduced-scale prototypes or vice versa. Traditional applications of DA in this context often encounter difficulties due to distorted scaling factors. This work resolves these challenges by developing a consistent scaling framework tailored for DMs. The methodology is demonstrated by a case study in which a calibrated DM of a wheel loader is scaled between an industrial-size system and a miniaturized laboratory system.
|
2025
|
 | Ramsay, Alastair; Vaziri, Vahid; Snee, Sean; Kapitaniak, Marcin: De-risking utilising a floating crane for floating offshore wind turbine maintenance. In: Marine Structures, vol. 107, pp. 104000, 2025. @article{nokey,
title = {De-risking utilising a floating crane for floating offshore wind turbine maintenance},
author = {Alastair Ramsay and Vahid Vaziri and Sean Snee and Marcin Kapitaniak},
doi = {https://doi.org/10.1016/j.marstruc.2025.104000},
year = {2025},
date = {2025-12-31},
urldate = {2025-12-31},
journal = {Marine Structures},
volume = {107},
pages = {104000},
abstract = {The growing deployment of floating offshore wind turbines (FOWTs) presents new challenges in maintenance operations, particularly concerning in-situ component replacement. This study builds upon prior research into the feasibility of using a floating crane for generator exchange on a semi-submersible FOWT, specifically the UMaine VolturnUS-S supporting a 15 MW reference turbine. Utilising a marine simulation environment at NDC, the dynamic responses of the generator, nacelle, and crane barge were evaluated under various sea states. The results highlight that while generator accelerations are a significant operational factor, the primary constraint is the risk of collision between the generator and turbine structure during lifting operations. Parametric studies revealed critical wave periods that exacerbate generator motions and collisions, and while modifications to the lifting methodology proved ineffective, reorienting the crane barge parallel to incoming waves showed a modest reduction in collisions. These findings underline the importance of vessel selection, wave direction, and sea state limitations in ensuring the viability of in-situ maintenance using floating cranes for FOWTs.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
The growing deployment of floating offshore wind turbines (FOWTs) presents new challenges in maintenance operations, particularly concerning in-situ component replacement. This study builds upon prior research into the feasibility of using a floating crane for generator exchange on a semi-submersible FOWT, specifically the UMaine VolturnUS-S supporting a 15 MW reference turbine. Utilising a marine simulation environment at NDC, the dynamic responses of the generator, nacelle, and crane barge were evaluated under various sea states. The results highlight that while generator accelerations are a significant operational factor, the primary constraint is the risk of collision between the generator and turbine structure during lifting operations. Parametric studies revealed critical wave periods that exacerbate generator motions and collisions, and while modifications to the lifting methodology proved ineffective, reorienting the crane barge parallel to incoming waves showed a modest reduction in collisions. These findings underline the importance of vessel selection, wave direction, and sea state limitations in ensuring the viability of in-situ maintenance using floating cranes for FOWTs. |
 | Abdolmohammadi, Armin; Mojahed, Navid; Nazari, Shima; Ravani, Bahram: Optimal Path Planning for Wheel Loader Automation Enabled by Efficient Soil–Tool Interaction Modeling. In: IEEE Control Systems Letters, vol. 9, pp. 2813-2818, 2025. @article{nokey,
title = {Optimal Path Planning for Wheel Loader Automation Enabled by Efficient Soil–Tool Interaction Modeling},
author = {Armin Abdolmohammadi and Navid Mojahed and Shima Nazari and Bahram Ravani},
doi = {10.1109/LCSYS.2025.3644993},
year = {2025},
date = {2025-12-17},
urldate = {2025-12-17},
journal = {IEEE Control Systems Letters},
volume = {9},
pages = {2813-2818},
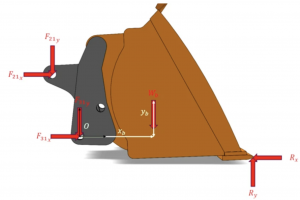
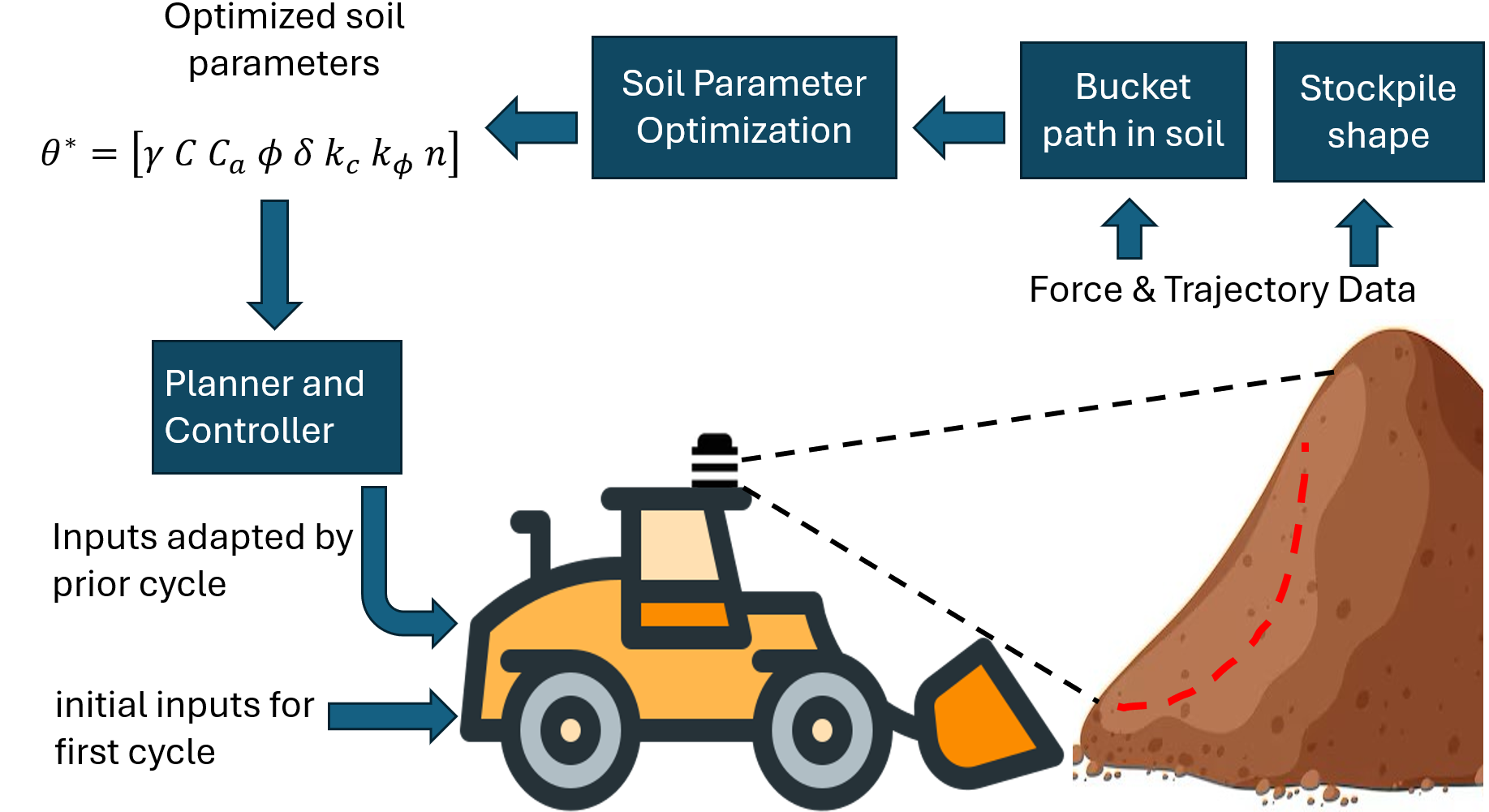
abstract = {Earthmoving operations with wheel loaders require substantial power and incur high operational costs. This letter presents an efficient automation framework based on a physics-informed, data-driven soil-tool interaction model. A reduced-order multi-step parameter estimation method, guided by the Fundamental Earthmoving Equation (FEE), is deployed for excavation force estimation. An optimal control problem is then formulated to compute energy-efficient bucket trajectories using soil parameters identified in the previous digging cycle. The results are validated using Algoryx Dynamics physics-based digital model of a wheel loader. It is shown that up to 40% energy saving is possible during the excavation phase compared to typical operator executed paths. Furthermore, the total computation time is comparable to a single digging cycle, highlighting the framework’s potential for real-time, energy-optimized wheel loader automation.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Earthmoving operations with wheel loaders require substantial power and incur high operational costs. This letter presents an efficient automation framework based on a physics-informed, data-driven soil-tool interaction model. A reduced-order multi-step parameter estimation method, guided by the Fundamental Earthmoving Equation (FEE), is deployed for excavation force estimation. An optimal control problem is then formulated to compute energy-efficient bucket trajectories using soil parameters identified in the previous digging cycle. The results are validated using Algoryx Dynamics physics-based digital model of a wheel loader. It is shown that up to 40% energy saving is possible during the excavation phase compared to typical operator executed paths. Furthermore, the total computation time is comparable to a single digging cycle, highlighting the framework’s potential for real-time, energy-optimized wheel loader automation. |
 | Jia, Zheng; Karayiannidis, Yiannis; Olofsson, Björn: Optimization-Based Path-Velocity Control for Time-Optimal Path Tracking under Uncertainties. 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. @conference{nokey,
title = {Optimization-Based Path-Velocity Control for Time-Optimal Path Tracking under Uncertainties},
author = {Zheng Jia and Yiannis Karayiannidis and Björn Olofsson},
url = {https://ieeexplore.ieee.org/abstract/document/11246597
https://lup.lub.lu.se/search/files/235444650/Optimization_Based_Path_Velocity_Control_for_Time_Optimal_Path_Tracking_under_Uncertainties-14.pdf},
doi = {10.1109/IROS60139.2025.11246597},
year = {2025},
date = {2025-11-27},
urldate = {2025-11-27},
booktitle = {2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {3773-3779},
abstract = {This paper addresses the path-tracking problem of time-optimal trajectories under model uncertainties, by proposing a real-time predictive scaling algorithm. The algorithm is formulated as a convex optimization problem, designed to balance the trade-off between improving feasibility and time optimality of a trajectory. The predicted trajectory is scaled based on the presence of path segments that are particularly sensitive to model uncertainties within the prediction horizon. Numerical simulations and experiments demonstrate that the proposed scaling algorithm reduces the path traversal time, while preserving similar path-tracking accuracy compared to an existing non-predictive method.},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
This paper addresses the path-tracking problem of time-optimal trajectories under model uncertainties, by proposing a real-time predictive scaling algorithm. The algorithm is formulated as a convex optimization problem, designed to balance the trade-off between improving feasibility and time optimality of a trajectory. The predicted trajectory is scaled based on the presence of path segments that are particularly sensitive to model uncertainties within the prediction horizon. Numerical simulations and experiments demonstrate that the proposed scaling algorithm reduces the path traversal time, while preserving similar path-tracking accuracy compared to an existing non-predictive method. |
 | Iannottaa, Marco; Yanga, Yuxuan; Storka, Johannes A.; Schaffernichtb, Erik; Stoyanov, Todor: Can Context Bridge the Reality Gap? Sim-to-Real Transfer of Context-Aware Policies. 2025. @unpublished{nokey,
title = {Can Context Bridge the Reality Gap? Sim-to-Real Transfer of Context-Aware Policies},
author = {Marco Iannottaa and Yuxuan Yanga and Johannes A. Storka and Erik Schaffernichtb and Todor Stoyanov},
url = {https://arxiv.org/abs/2511.04249},
year = {2025},
date = {2025-11-06},
urldate = {2025-11-06},
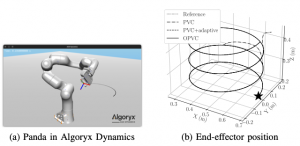
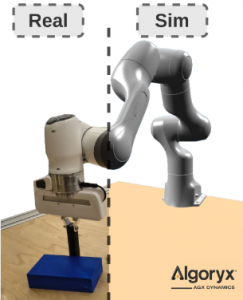
abstract = {Sim-to-real transfer remains a major challenge in reinforcement learning (RL) for robotics, as policies trained in simulation often fail to generalize to the real world due to discrepancies in environment dynamics. Domain Randomization (DR) mitigates this issue by exposing the policy to a wide range of randomized dynamics during training, yet leading to a reduction in performance. While standard approaches typically train policies agnostic to these variations, we investigate whether sim-to-real transfer can be improved by conditioning the policy on an estimate of the dynamics parameters -- referred to as context. To this end, we integrate a context estimation module into a DR-based RL framework and systematically compare SOTA supervision strategies. We evaluate the resulting context-aware policies in both a canonical control benchmark and a real-world pushing task using a Franka Emika Panda robot. Results show that context-aware policies outperform the context-agnostic baseline across all settings, although the best supervision strategy depends on the task. },
keywords = {},
pubstate = {published},
tppubtype = {unpublished}
}
Sim-to-real transfer remains a major challenge in reinforcement learning (RL) for robotics, as policies trained in simulation often fail to generalize to the real world due to discrepancies in environment dynamics. Domain Randomization (DR) mitigates this issue by exposing the policy to a wide range of randomized dynamics during training, yet leading to a reduction in performance. While standard approaches typically train policies agnostic to these variations, we investigate whether sim-to-real transfer can be improved by conditioning the policy on an estimate of the dynamics parameters -- referred to as context. To this end, we integrate a context estimation module into a DR-based RL framework and systematically compare SOTA supervision strategies. We evaluate the resulting context-aware policies in both a canonical control benchmark and a real-world pushing task using a Franka Emika Panda robot. Results show that context-aware policies outperform the context-agnostic baseline across all settings, although the best supervision strategy depends on the task. |
 | Felskea, Mirco; Redeniusa, Jannik; Happichb, Georg; Schöning, Julius: Toward an Agricultural Operational Design Domain: A Framework. 2025. @unpublished{nokey,
title = {Toward an Agricultural Operational Design Domain: A Framework},
author = {Mirco Felskea and Jannik Redeniusa and Georg Happichb and Julius Schöning},
url = {https://arxiv.org/abs/2511.02937},
year = {2025},
date = {2025-11-04},
urldate = {2025-11-04},
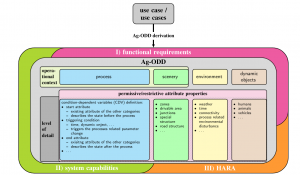
abstract = {The agricultural sector increasingly relies on autonomous systems that operate in complex and variable environments. Unlike on-road applications, agricultural automation integrates driving and working processes, each of which imposes distinct operational constraints. Handling this complexity and ensuring consistency throughout the development and validation processes requires a structured, transparent, and verified description of the environment. However, existing Operational Design Domain (ODD) concepts do not yet address the unique challenges of agricultural applications.
Therefore, this work introduces the Agricultural ODD (Ag-ODD) Framework, which can be used to describe and verify the operational boundaries of autonomous agricultural systems. The Ag-ODD Framework consists of three core elements. First, the Ag-ODD description concept, which provides a structured method for unambiguously defining environmental and operational parameters using concepts from ASAM Open ODD and CityGML. Second, the 7-Layer Model derived from the PEGASUS 6-Layer Model, has been extended to include a process layer to capture dynamic agricultural operations. Third, the iterative verification process verifies the Ag-ODD against its corresponding logical scenarios, derived from the 7-Layer Model, to ensure the Ag-ODD's completeness and consistency.
Together, these elements provide a consistent approach for creating unambiguous and verifiable Ag-ODD. Demonstrative use cases show how the Ag-ODD Framework can support the standardization and scalability of environmental descriptions for autonomous agricultural systems. },
keywords = {},
pubstate = {published},
tppubtype = {unpublished}
}
The agricultural sector increasingly relies on autonomous systems that operate in complex and variable environments. Unlike on-road applications, agricultural automation integrates driving and working processes, each of which imposes distinct operational constraints. Handling this complexity and ensuring consistency throughout the development and validation processes requires a structured, transparent, and verified description of the environment. However, existing Operational Design Domain (ODD) concepts do not yet address the unique challenges of agricultural applications.
Therefore, this work introduces the Agricultural ODD (Ag-ODD) Framework, which can be used to describe and verify the operational boundaries of autonomous agricultural systems. The Ag-ODD Framework consists of three core elements. First, the Ag-ODD description concept, which provides a structured method for unambiguously defining environmental and operational parameters using concepts from ASAM Open ODD and CityGML. Second, the 7-Layer Model derived from the PEGASUS 6-Layer Model, has been extended to include a process layer to capture dynamic agricultural operations. Third, the iterative verification process verifies the Ag-ODD against its corresponding logical scenarios, derived from the 7-Layer Model, to ensure the Ag-ODD's completeness and consistency.
Together, these elements provide a consistent approach for creating unambiguous and verifiable Ag-ODD. Demonstrative use cases show how the Ag-ODD Framework can support the standardization and scalability of environmental descriptions for autonomous agricultural systems. |
 | Lindmark, Daniel; Andersson, Jonas; Bodin, Kenneth; Bodin, Tora; Börjesson, Hugo; Nordfelth, Fredrik; Servin, Martin: An integrated process for design and control of lunar robotics using AI and simulation. In: ASTRA 2025 -- 18th Symposium on Advanced Space Technologies in Robotics and Automation, 2025. @inproceedings{Lindmark-ASTRA-2025,
title = {An integrated process for design and control of lunar robotics using AI and simulation},
author = {Daniel Lindmark and Jonas Andersson and Kenneth Bodin and Tora Bodin and Hugo Börjesson and Fredrik Nordfelth and Martin Servin},
url = {https://arxiv.org/abs/2509.12367
https://arxiv.org/pdf/2509.12367
https://www.algoryx.se/papers/astra25-lunar-robotics/},
year = {2025},
date = {2025-10-07},
urldate = {2025-10-07},
booktitle = {ASTRA 2025 -- 18th Symposium on Advanced Space Technologies in Robotics and Automation},
abstract = {We envision an integrated process for developing lunar construction equipment, where physical design and control are explored in parallel. In this paper, we describe a technical framework that supports this process. It relies on OpenPLX, a readable/writable declarative language that links CAD-models and autonomous systems to high-fidelity, real-time 3D simulations of contacting multibody dynamics, machine regolith interaction forces, and non-ideal sensors. To demonstrate its capabilities, we present two case studies, including an autonomous lunar rover that combines a vision-language model for navigation with a reinforcement learning-based control policy for locomotion.
},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
We envision an integrated process for developing lunar construction equipment, where physical design and control are explored in parallel. In this paper, we describe a technical framework that supports this process. It relies on OpenPLX, a readable/writable declarative language that links CAD-models and autonomous systems to high-fidelity, real-time 3D simulations of contacting multibody dynamics, machine regolith interaction forces, and non-ideal sensors. To demonstrate its capabilities, we present two case studies, including an autonomous lunar rover that combines a vision-language model for navigation with a reinforcement learning-based control policy for locomotion.
|
 | Larsson, Kevin; Ståhlberg, Isak Bjelke: Virtual Reality Heavy Equipment Training: Evaluating Gamification’s Effect on Engagement. 2025. @mastersthesis{nokey,
title = {Virtual Reality Heavy Equipment Training: Evaluating Gamification’s Effect on Engagement},
author = {Kevin Larsson and Isak Bjelke Ståhlberg},
year = {2025},
date = {2025-08-20},
urldate = {2025-08-20},
abstract = {Heavy-equipment operation demands extensive hands-on practice, yetaccess to real machinery and high-fidelity simulators is costly andlogistically constrained. Virtual-reality (VR) training offers a scalablealternative, but sustaining learner engagement over repeated sessionsremains a challenge. This master’s thesis investigates whether, andwhich, gamification elements can raise user engagement in a VRexcavator simulator without undermining training value.
A baseline “plain” simulator and an otherwise identical “gamified”variant were developed in Unity with AGX Dynamics. The gamifiedversion layered lightweight, goal-oriented mechanics identified in theliterature, score feedback, collectible gold and gems convertible toin-game currency, a collectible treasure display-case, cosmetic andutility upgrades, ambient audio, and a penalty-based damage system,onto the core excavation task. Six volunteer participants (students andstaff) completed both versions in a counter-balanced within-subjectsdesign. Engagement was measured with the 12-item User EngagementScale – Short Form (UES-SF) and by behavioral logs (play duration,excavated volume, collision count, excavation activity).
Results show that gamification markedly increased the FocusedAttention dimension of engagement (median ∆ = +2 on a 5-pointscale; 5 / 6 participants), while Aesthetic Appeal and Reward rosemodestly (median ∆ = +0.5). Perceived Usability was unchanged.Behaviorally, four participants played longer in the gamified condition(median +77 s). Qualitative feedback credited the currency–upgradeloop, buried treasures, and a music player with making the taskmore motivating and easier to focus on, supporting Hypothesis H1(gamification raises engagement) and indicating that goal-orientedfeatures (H2) were the primary drivers.
The study concludes that carefully selected gamification canboost short-term engagement in VR heavy-equipment trainingwithout degrading operational performance, and may even accelerateskill familiarization. Recommendations for industry simulatorsinclude profession-relevant reward systems and configurable sensoryenhancements to accommodate individual preferences.},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
Heavy-equipment operation demands extensive hands-on practice, yetaccess to real machinery and high-fidelity simulators is costly andlogistically constrained. Virtual-reality (VR) training offers a scalablealternative, but sustaining learner engagement over repeated sessionsremains a challenge. This master’s thesis investigates whether, andwhich, gamification elements can raise user engagement in a VRexcavator simulator without undermining training value.
A baseline “plain” simulator and an otherwise identical “gamified”variant were developed in Unity with AGX Dynamics. The gamifiedversion layered lightweight, goal-oriented mechanics identified in theliterature, score feedback, collectible gold and gems convertible toin-game currency, a collectible treasure display-case, cosmetic andutility upgrades, ambient audio, and a penalty-based damage system,onto the core excavation task. Six volunteer participants (students andstaff) completed both versions in a counter-balanced within-subjectsdesign. Engagement was measured with the 12-item User EngagementScale – Short Form (UES-SF) and by behavioral logs (play duration,excavated volume, collision count, excavation activity).
Results show that gamification markedly increased the FocusedAttention dimension of engagement (median ∆ = +2 on a 5-pointscale; 5 / 6 participants), while Aesthetic Appeal and Reward rosemodestly (median ∆ = +0.5). Perceived Usability was unchanged.Behaviorally, four participants played longer in the gamified condition(median +77 s). Qualitative feedback credited the currency–upgradeloop, buried treasures, and a music player with making the taskmore motivating and easier to focus on, supporting Hypothesis H1(gamification raises engagement) and indicating that goal-orientedfeatures (H2) were the primary drivers.
The study concludes that carefully selected gamification canboost short-term engagement in VR heavy-equipment trainingwithout degrading operational performance, and may even accelerateskill familiarization. Recommendations for industry simulatorsinclude profession-relevant reward systems and configurable sensoryenhancements to accommodate individual preferences. |
 | Navid Mojahed Armin Abdolmohammadi, Shima Nazari: Data-Efficient Excavation Force Estimation for Wheel Loaders. In: IEEE Transactions on Vehicular Technology, 2025. @article{nokey,
title = {Data-Efficient Excavation Force Estimation for Wheel Loaders},
author = {Armin Abdolmohammadi, Navid Mojahed, Shima Nazari, Bahram Ravani},
url = {https://arxiv.org/pdf/2506.22579},
year = {2025},
date = {2025-06-27},
urldate = {2025-06-27},
journal = {IEEE Transactions on Vehicular Technology},
abstract = {Accurate excavation force prediction is essential for enabling autonomous operation and optimizing control strategies in earthmoving machinery. Conventional methods typically require extensive data collection or simulations across diverse soil types, limiting scalability and adaptability. This paper proposes a data-efficient framework that calibrates soil parameters using force data from the prior bucket-loading cycle. Leveraging an analytical soil-tool interaction model, the fundamental earthmoving equation (FEE), our approach uses a multi-stage optimization strategy, on soil parameters during the loading phase. These fitted parameters are then used to predict excavation forces in the upcoming digging cycle, allowing the system to adapt its control inputs without the need for extensive data collection or machine learning-based model training. The framework is validated in high-fidelity simulations using the Algoryx Dynamics engine, across multiple soil types and excavation trajectories, demonstrating accurate force predictions with root-mean-square errors of 10% to 15% in primary test cases. This cycle-to-cycle adaptation strategy showcases the potential for online and scalable efficient path planning for wheel loader operations.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
Accurate excavation force prediction is essential for enabling autonomous operation and optimizing control strategies in earthmoving machinery. Conventional methods typically require extensive data collection or simulations across diverse soil types, limiting scalability and adaptability. This paper proposes a data-efficient framework that calibrates soil parameters using force data from the prior bucket-loading cycle. Leveraging an analytical soil-tool interaction model, the fundamental earthmoving equation (FEE), our approach uses a multi-stage optimization strategy, on soil parameters during the loading phase. These fitted parameters are then used to predict excavation forces in the upcoming digging cycle, allowing the system to adapt its control inputs without the need for extensive data collection or machine learning-based model training. The framework is validated in high-fidelity simulations using the Algoryx Dynamics engine, across multiple soil types and excavation trajectories, demonstrating accurate force predictions with root-mean-square errors of 10% to 15% in primary test cases. This cycle-to-cycle adaptation strategy showcases the potential for online and scalable efficient path planning for wheel loader operations. |
 | Bergquist, Moa: Visualizing Signal Interfaces For Machine Simulation. Umeå University, 2025. @mastersthesis{nokey,
title = {Visualizing Signal Interfaces For Machine Simulation},
author = {Moa Bergquist},
url = {https://www.diva-portal.org/smash/record.jsf?pid=diva2%3A1972087&dswid=21},
year = {2025},
date = {2025-06-19},
urldate = {2025-06-19},
school = {Umeå University},
abstract = {This study explores the challenges of managing input and output signals in machine simulations built with OpenPLX, a text-based modeling language for digital twins developed by Algoryx Simulation AB. Due to the large and fully text-based nature of OpenPLX models, locating, identifying, and connecting signals can be difficult, especially for domain experts without a programming background. Debugging and integrating external control systems are particularly time-consuming and complex. To address these issues, Algoryx is developing a visual programming tool with a box diagram interface to complement the existing text editor. The goal is to enable a 1:1 translation between visual and textual code while improving signal and system interaction visualization. This project focused on designing a visual interface to enhance signal management, localization, and mapping to external systems. Using the Design Thinking methodology, the project included tool evaluation, theoretical research on visual programming and signal handling, and semi-structured interviews with internal OpenPLX users. User needs were defined via personas, journey maps, and “How Might We” questions. Ideation techniques like brainstorming and SCAMPER were used to generate concepts. Iterative digital prototypes were developed in Figma, emphasizing key signal-handling features like listing, filtering, visualization, and mapping. Usability testing was conducted using the Hi-Fi prototype. Results confirmed the visual interface’s potential to improve signal management. Users appreciated visual elements such as color-coded indicators for inputs/outputs and the navigational panel. Challenges included confusion around icon meanings, alias management across interfaces, and unclear terminology. Users also wanted more contextual information, such as the original origin and linkage. The study concludes that a visual box-diagram interface provides a significantly more intuitive approach to signal management than the current text-based workflow. Key design patterns include a dedicated signal panel with search/filter functions, clear display of signal type and status, metadata and alias access, a hierarchical system view, visual signal clustering, and clear interface connection indicators. Future development should refine visual indicators and terminology, improve alias handling, add interface-specific filters, and explore layout variations to reduce bias. There’s strong potential for AI-driven features and reusable templates to further streamline workflows.},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
This study explores the challenges of managing input and output signals in machine simulations built with OpenPLX, a text-based modeling language for digital twins developed by Algoryx Simulation AB. Due to the large and fully text-based nature of OpenPLX models, locating, identifying, and connecting signals can be difficult, especially for domain experts without a programming background. Debugging and integrating external control systems are particularly time-consuming and complex. To address these issues, Algoryx is developing a visual programming tool with a box diagram interface to complement the existing text editor. The goal is to enable a 1:1 translation between visual and textual code while improving signal and system interaction visualization. This project focused on designing a visual interface to enhance signal management, localization, and mapping to external systems. Using the Design Thinking methodology, the project included tool evaluation, theoretical research on visual programming and signal handling, and semi-structured interviews with internal OpenPLX users. User needs were defined via personas, journey maps, and “How Might We” questions. Ideation techniques like brainstorming and SCAMPER were used to generate concepts. Iterative digital prototypes were developed in Figma, emphasizing key signal-handling features like listing, filtering, visualization, and mapping. Usability testing was conducted using the Hi-Fi prototype. Results confirmed the visual interface’s potential to improve signal management. Users appreciated visual elements such as color-coded indicators for inputs/outputs and the navigational panel. Challenges included confusion around icon meanings, alias management across interfaces, and unclear terminology. Users also wanted more contextual information, such as the original origin and linkage. The study concludes that a visual box-diagram interface provides a significantly more intuitive approach to signal management than the current text-based workflow. Key design patterns include a dedicated signal panel with search/filter functions, clear display of signal type and status, metadata and alias access, a hierarchical system view, visual signal clustering, and clear interface connection indicators. Future development should refine visual indicators and terminology, improve alias handling, add interface-specific filters, and explore layout variations to reduce bias. There’s strong potential for AI-driven features and reusable templates to further streamline workflows. |
 | Backlund, Ebba: Navigating Hierarchical Visual Diagrams in Complex Machine Modelling: Design and Evaluation of a Node-Based Interface for OpenPLX Models. 2025. @mastersthesis{nokey,
title = {Navigating Hierarchical Visual Diagrams in Complex Machine Modelling: Design and Evaluation of a Node-Based Interface for OpenPLX Models},
author = {Ebba Backlund},
url = {https://www.diva-portal.org/smash/record.jsf?pid=diva2%3A1972088&dswid=-1804},
year = {2025},
date = {2025-06-19},
urldate = {2025-06-19},
abstract = {Designing visual interfaces for complex machine simulation models presents unique challenges, particularly in representing hierarchical structures and mechanical connections in a clear and accessible way. This is especially relevant in the context of OpenPLX, an open-source declarative modelling language developed for creating digital twins with integrated physics. This thesis applied a Design Thinking approach involving user interviews and iterative prototyping to explore how a node-based interface could enhance navigation and model understanding.
Initial research revealed difficulties users face in navigating large text-based OpenPLX files and understanding complex component relationships. A core design decision was to represent mechanical connections not merely as lines, but as independent nodes containing their own parameters and internal structure, aiming for a more accurate reflection of mechanical reality. To manage visual complexity and aid navigation in large graphs, the design incorporated features such as collapsible node groups, predefined abstraction levels (overview, subsystems, full detail), and a focus mode to highlight relevant elements. Two navigation patterns were explored and prototyped: opening nodes in new tabs and expanding them in the same view, supported by aids like breadcrumbs and a minimap.
User testing with four internal OpenPLX users provided validation and insights. Users easily understood the hierarchical structure. The concept of connections as nodes was generally well-received, though some preferred simpler visual representations. Abstraction levels and grouping/collapsing features were valued for complexity management. Breadcrumbs were praised for maintaining context. However, connection line colours caused confusion, and the feature to dim unrelated nodes was not immediately obvious. Collapsing nodes also raised a perception of altering model structure for one user.
In conclusion, the project successfully identified and prototyped design strategies for a node-based interface in complex machine modelling, focusing on clear representation of hierarchy and connections, and effective navigation and complexity management. While the design patterns show internal validity and address key user needs, the reliability and external validity are limited by the small sample size of internal users, highlighting the need for broader validation.},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
Designing visual interfaces for complex machine simulation models presents unique challenges, particularly in representing hierarchical structures and mechanical connections in a clear and accessible way. This is especially relevant in the context of OpenPLX, an open-source declarative modelling language developed for creating digital twins with integrated physics. This thesis applied a Design Thinking approach involving user interviews and iterative prototyping to explore how a node-based interface could enhance navigation and model understanding.
Initial research revealed difficulties users face in navigating large text-based OpenPLX files and understanding complex component relationships. A core design decision was to represent mechanical connections not merely as lines, but as independent nodes containing their own parameters and internal structure, aiming for a more accurate reflection of mechanical reality. To manage visual complexity and aid navigation in large graphs, the design incorporated features such as collapsible node groups, predefined abstraction levels (overview, subsystems, full detail), and a focus mode to highlight relevant elements. Two navigation patterns were explored and prototyped: opening nodes in new tabs and expanding them in the same view, supported by aids like breadcrumbs and a minimap.
User testing with four internal OpenPLX users provided validation and insights. Users easily understood the hierarchical structure. The concept of connections as nodes was generally well-received, though some preferred simpler visual representations. Abstraction levels and grouping/collapsing features were valued for complexity management. Breadcrumbs were praised for maintaining context. However, connection line colours caused confusion, and the feature to dim unrelated nodes was not immediately obvious. Collapsing nodes also raised a perception of altering model structure for one user.
In conclusion, the project successfully identified and prototyped design strategies for a node-based interface in complex machine modelling, focusing on clear representation of hierarchy and connections, and effective navigation and complexity management. While the design patterns show internal validity and address key user needs, the reliability and external validity are limited by the small sample size of internal users, highlighting the need for broader validation. |
 | Chougule, Sukhadip Mhankali; Murali, Govindarajan; Kurhade, Anant Sidhappa: Design and Analysis of Industrial Material Handling Systems using FEA and Dynamic Simulation Techniques. In: Journal of Scientific & Industrial Research, vol. 84, pp. 645-653, 2025. @article{nokey,
title = {Design and Analysis of Industrial Material Handling Systems using FEA and Dynamic Simulation Techniques},
author = {Sukhadip Mhankali Chougule and Govindarajan Murali and Anant Sidhappa Kurhade},
year = {2025},
date = {2025-06-18},
urldate = {2025-06-18},
journal = {Journal of Scientific & Industrial Research},
volume = {84},
pages = {645-653},
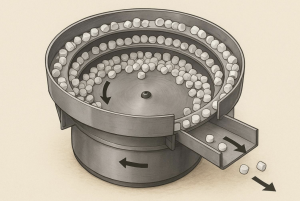
abstract = {This study focuses on the design, simulation, and experimental validation of advanced material handling systems, specifically avibratory bowl feeder and a paddle mixer, aimed at enhancing automation efficiency in modern industrial environments. The scopeencompasses improving part orientation and mixing reliability in sectors such as automotive, pharmaceutical, and food processing industries. A vibratory bowl feeder was custom-designed for nuts and bolts, addressing common challenges such as inconsistent feed rates, jamming, and adaptability. The methodology involved 3D CAD modeling in SolidWorks, finite element analysis (FEA) for structural integrity verification, and dynamic simulation using Algoryx Momentum to predict system behavior under varied operating conditions. A spring-mass model was developed to compute natural frequencies and vibration characteristics. Simulation results were validated through experimentation across a frequency range of 47–79.75 Hz, measuring feed rate and part delivery time. Key findings indicate that the vibratory feeder achieved up to 200 parts per minute and over 95% orientation accuracy. FEA confirmed structural safety with stresses below 312 MPa and a verified natural frequency of 78.4 Hz. Simulation outcomes closely matched experimental results in the 50–60 Hz range but deviated at lower frequencies, highlighting real-world inefficiencies not captured in the model. The study concludes that integrating simulation with physical validation ensures robust design, reduced development costs, and enhanced system efficiency. Future work includes incorporating AI-based control and smart sensors to improve adaptability, accuracy, and energy efficiency. This work establishes a strong foundation for the development of intelligent, high-performance material handling systems.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
This study focuses on the design, simulation, and experimental validation of advanced material handling systems, specifically avibratory bowl feeder and a paddle mixer, aimed at enhancing automation efficiency in modern industrial environments. The scopeencompasses improving part orientation and mixing reliability in sectors such as automotive, pharmaceutical, and food processing industries. A vibratory bowl feeder was custom-designed for nuts and bolts, addressing common challenges such as inconsistent feed rates, jamming, and adaptability. The methodology involved 3D CAD modeling in SolidWorks, finite element analysis (FEA) for structural integrity verification, and dynamic simulation using Algoryx Momentum to predict system behavior under varied operating conditions. A spring-mass model was developed to compute natural frequencies and vibration characteristics. Simulation results were validated through experimentation across a frequency range of 47–79.75 Hz, measuring feed rate and part delivery time. Key findings indicate that the vibratory feeder achieved up to 200 parts per minute and over 95% orientation accuracy. FEA confirmed structural safety with stresses below 312 MPa and a verified natural frequency of 78.4 Hz. Simulation outcomes closely matched experimental results in the 50–60 Hz range but deviated at lower frequencies, highlighting real-world inefficiencies not captured in the model. The study concludes that integrating simulation with physical validation ensures robust design, reduced development costs, and enhanced system efficiency. Future work includes incorporating AI-based control and smart sensors to improve adaptability, accuracy, and energy efficiency. This work establishes a strong foundation for the development of intelligent, high-performance material handling systems. |
 | Linde, Mattias; Lindmark, Daniel; Ålstig, Sandra; Servin, Martin: A simulation framework for autonomous lunar construction work. ISTVS 2025, the 55th Conference of the International Society for Terrain-Vehicle Systems. arxiv:2505.22091, 2025. @conference{nokey,
title = {A simulation framework for autonomous lunar construction work},
author = {Mattias Linde and Daniel Lindmark and Sandra Ålstig and Martin Servin},
url = {https://www.algoryx.se/papers/lunar-construction/
https://arxiv.org/abs/2505.22091
https://arxiv.org/pdf/2505.22091},
year = {2025},
date = {2025-05-29},
urldate = {2025-05-29},
booktitle = {ISTVS 2025, the 55th Conference of the International Society for Terrain-Vehicle Systems. arxiv:2505.22091},
abstract = {We present a simulation framework for lunar construction work involving multiple autonomous machines. The framework supports modelling of construction scenarios and autonomy solutions, execution of the scenarios in simulation, and analysis of work time and energy consumption throughout the construction project. The simulations are based on physics-based models for contacting multibody dynamics and deformable terrain, including vehicle-soil interaction forces and soil flow in real time. A behaviour tree manages the operational logic and error handling, which enables the representation of complex behaviours through a discrete set of simpler tasks in a modular hierarchical structure. High-level decision-making is separated from lower-level control algorithms, with the two connected via ROS2. Excavation movements are controlled through inverse kinematics and tracking controllers. The framework is tested and demonstrated on two different lunar construction scenarios.},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
We present a simulation framework for lunar construction work involving multiple autonomous machines. The framework supports modelling of construction scenarios and autonomy solutions, execution of the scenarios in simulation, and analysis of work time and energy consumption throughout the construction project. The simulations are based on physics-based models for contacting multibody dynamics and deformable terrain, including vehicle-soil interaction forces and soil flow in real time. A behaviour tree manages the operational logic and error handling, which enables the representation of complex behaviours through a discrete set of simpler tasks in a modular hierarchical structure. High-level decision-making is separated from lower-level control algorithms, with the two connected via ROS2. Excavation movements are controlled through inverse kinematics and tracking controllers. The framework is tested and demonstrated on two different lunar construction scenarios. |
 | Aluckal, Christo; Lal, Roopesh Vinodh Kumar; Courtney, Sean; Turkar, Yash; Dighe, Yashom; Kim, Young-Jin; Gemerek, Jake; Dantu, Karthik: TERA: A Simulation Environment for Terrain Excavation Robot Autonomy. In: 2025 IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR), pp. 1-6, 2025. @inproceedings{nokey,
title = {TERA: A Simulation Environment for Terrain Excavation Robot Autonomy},
author = {Christo Aluckal and Roopesh Vinodh Kumar Lal and Sean Courtney and Yash Turkar and Yashom Dighe and Young-Jin Kim and Jake Gemerek and Karthik Dantu},
doi = {10.1109/SIMPAR62925.2025.10979147},
year = {2025},
date = {2025-04-30},
urldate = {2025-04-30},
booktitle = {2025 IEEE International Conference on Simulation, Modeling, and Programming for Autonomous Robots (SIMPAR)},
pages = {1-6},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
|
 | Tikka, Petri; Saarinen, Hannu; Martikainen, Hannu; Brace, William; Lyytinen, Janne: Simulated installation of a breeding blanket segment in a two-port mover context. In: Fusion Engineering and Design, vol. 215, no. 114989, 2025. @article{nokey,
title = {Simulated installation of a breeding blanket segment in a two-port mover context},
author = {Petri Tikka and Hannu Saarinen and Hannu Martikainen and William Brace and Janne Lyytinen},
url = {https://www.sciencedirect.com/science/article/pii/S0920379625001899},
year = {2025},
date = {2025-03-25},
urldate = {2025-03-25},
journal = {Fusion Engineering and Design},
volume = {215},
number = {114989},
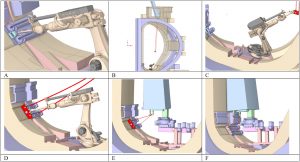
abstract = {The abstract relates to work undertaken on the Two Port Mover (TPM) Remote Maintenance (RM) concept in European DEMO. The focus of the study was to assess the operational procedures for installing the Blanket Leg Unit and Lower Port Winch of the Two-Port Mover. In addition, alternative means for constraining the rotations of the breeding blanket during the removal and installation process of blankets were studied.
The Two-Port Mover was tested in a dynamic simulation. The assessment process was carried out by using a Unity game-engine in a combination of AGX Dynamics for Unity plugin. The scope was to utilize virtual prototyping to visualize how the cabling of the studied Lower Port winch approach would interact within the Vacuum Vessel sector. Dynamic physics enables the cabling and the interface plate to collide with the surrounding environment and proper adjustments to the performed procedures can be validated already in the early stages of the design process. The final connection with the interface plate and the winches is performed by a remotely operated manipulator in a virtual environment. In the context of this simulation, the manipulator was controlled with a haptic device. This ensured precise control of the connection process, but also demonstrated how the cables would interact while operating the manipulator. Thus, influencing initial TPM design maturity.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
The abstract relates to work undertaken on the Two Port Mover (TPM) Remote Maintenance (RM) concept in European DEMO. The focus of the study was to assess the operational procedures for installing the Blanket Leg Unit and Lower Port Winch of the Two-Port Mover. In addition, alternative means for constraining the rotations of the breeding blanket during the removal and installation process of blankets were studied.
The Two-Port Mover was tested in a dynamic simulation. The assessment process was carried out by using a Unity game-engine in a combination of AGX Dynamics for Unity plugin. The scope was to utilize virtual prototyping to visualize how the cabling of the studied Lower Port winch approach would interact within the Vacuum Vessel sector. Dynamic physics enables the cabling and the interface plate to collide with the surrounding environment and proper adjustments to the performed procedures can be validated already in the early stages of the design process. The final connection with the interface plate and the winches is performed by a remotely operated manipulator in a virtual environment. In the context of this simulation, the manipulator was controlled with a haptic device. This ensured precise control of the connection process, but also demonstrated how the cables would interact while operating the manipulator. Thus, influencing initial TPM design maturity. |
 | Fälldin, Arvid; Löfstedt, Tommy; Semberg, Tobias; Wallin, Erik; Servin, Martin: Synthesizing multi-log grasp poses in cluttered environments. 2025. @techreport{nokey,
title = {Synthesizing multi-log grasp poses in cluttered environments},
author = {Arvid Fälldin and Tommy Löfstedt and Tobias Semberg and Erik Wallin and Martin Servin},
url = {https://arxiv.org/abs/2403.11623
https://arxiv.org/pdf/2403.11623
https://umit.cs.umu.se/grasp-synthesis/},
year = {2025},
date = {2025-03-21},
urldate = {2025-03-21},
abstract = {Multi-object grasping is a challenging task. It is important for energy and cost-efficient operation of industrial crane manipulators, such as those used to collect tree logs from the forest floor and on forest machines. In this work, we used synthetic data from physics simulations to explore how data-driven modeling can be used to infer multi-object grasp poses from images. We showed that convolutional neural networks can be trained specifically for synthesizing multi-object grasps. Using RGB-Depth images and instance segmentation masks as input, a U-Net model outputs grasp maps with the corresponding grapple orientation and opening width. Given an observation of a pile of logs, the model can be used to synthesize and rate the possible grasp poses and select the most suitable one, with the possibility to respect changing operational constraints such as lift capacity and reach. When tested on previously unseen data, the proposed model found successful grasp poses with an accuracy up to 96%.
},
keywords = {},
pubstate = {published},
tppubtype = {techreport}
}
Multi-object grasping is a challenging task. It is important for energy and cost-efficient operation of industrial crane manipulators, such as those used to collect tree logs from the forest floor and on forest machines. In this work, we used synthetic data from physics simulations to explore how data-driven modeling can be used to infer multi-object grasp poses from images. We showed that convolutional neural networks can be trained specifically for synthesizing multi-object grasps. Using RGB-Depth images and instance segmentation masks as input, a U-Net model outputs grasp maps with the corresponding grapple orientation and opening width. Given an observation of a pile of logs, the model can be used to synthesize and rate the possible grasp poses and select the most suitable one, with the possibility to respect changing operational constraints such as lift capacity and reach. When tested on previously unseen data, the proposed model found successful grasp poses with an accuracy up to 96%.
|
 | Ozaki, Ryota; Motomura, Takuto; Nakayama, Yutaka; Mori, Shouta: Blade Control for Bulk Dozer Push by Bulldozer using Reinforcement Learning. In: IECON 2024 - 50th Annual Conference of the IEEE Industrial Electronics Society, 2025. @inproceedings{Ozaki:2924,
title = {Blade Control for Bulk Dozer Push by Bulldozer using Reinforcement Learning},
author = {Ozaki, Ryota and Motomura, Takuto and Nakayama, Yutaka and Mori, Shouta},
url = {https://ieeexplore.ieee.org/document/10905075},
doi = {10.1109/IECON55916.2024.10905075},
year = {2025},
date = {2025-03-10},
booktitle = {IECON 2024 - 50th Annual Conference of the IEEE Industrial Electronics Society},
journal = {IECON 2024 - 50th Annual Conference of the IEEE Industrial Electronics Society},
number = {1-6},
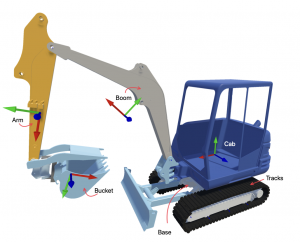
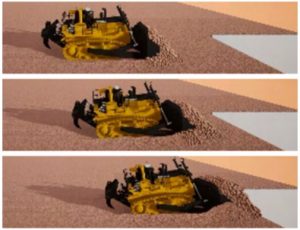
abstract = {Bulldozers in mines are used for bulk dozer push. In this operation, the bulldozers push unwanted soil covering ore off cliffs. Conventional rule-based blade control methods predetermine the excavation depth, leading to suboptimal performance in each environment. This paper presents a novel blade control method using deep reinforcement learning for the operation. The proposed model takes vehicle information (e.g. pose, speed, engine speed) and terrain information as inputs and outputs blade commands. In the training, the model is given a higher reward when the agent dumps a larger amount of soil in a shorter time. This reward function encourages the agent to achieve efficient work. The proposed method is trained and evaluated in a physics simulator which simulates interactions between a bulldozer and soil. The simulation includes the powertrain characteristics of the bulldozer, which is important for bulk dozer push. To show the proposed method outperforms a conventional rule-based control method in productivity, experiments are performed in the evaluation.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Bulldozers in mines are used for bulk dozer push. In this operation, the bulldozers push unwanted soil covering ore off cliffs. Conventional rule-based blade control methods predetermine the excavation depth, leading to suboptimal performance in each environment. This paper presents a novel blade control method using deep reinforcement learning for the operation. The proposed model takes vehicle information (e.g. pose, speed, engine speed) and terrain information as inputs and outputs blade commands. In the training, the model is given a higher reward when the agent dumps a larger amount of soil in a shorter time. This reward function encourages the agent to achieve efficient work. The proposed method is trained and evaluated in a physics simulator which simulates interactions between a bulldozer and soil. The simulation includes the powertrain characteristics of the bulldozer, which is important for bulk dozer push. To show the proposed method outperforms a conventional rule-based control method in productivity, experiments are performed in the evaluation. |
 | Towards Multi-Layered Dynamic Off-Road Maps. 2025, ISBN: 978-91-7485-700-9. @phdthesis{nokey,
title = {Towards Multi-Layered Dynamic Off-Road Maps},
url = {https://www.diva-portal.org/smash/record.jsf?pid=diva2%3A1932151&dswid=-3413},
isbn = {978-91-7485-700-9},
year = {2025},
date = {2025-01-28},
urldate = {2025-01-28},
abstract = {This thesis is about the requirement elicitation and conceptual modelling of a multi-layered dynamic off-road map with an emphasis on advancing toward real-world validation scenarios. Specifically, it addresses the challenges in fleet management for autonomous haulers moving earth material in open-pit mining applications at construction sites. The map used to coordinate these autonomous haulers is critical in ensuring productivity and safety, with terrain friction being a key aspect. However, the current state-of-practice relies on static maps that do not support dynamic updating to reflect changes in terrain properties.To address these limitations, this thesis explores the requirements for a multilayered dynamic map and proposes their integration with the fleet management system using a standardised approach based on a digital twin framework for manufacturing. Although static maps require validation, maps populated with dynamic components necessitate an even more rigorous validation prior to implementation in real-world applications. Therefore, validation scenarios based on best practices are designed to ensure the map’s functionality under various real-world conditions. },
keywords = {},
pubstate = {published},
tppubtype = {phdthesis}
}
This thesis is about the requirement elicitation and conceptual modelling of a multi-layered dynamic off-road map with an emphasis on advancing toward real-world validation scenarios. Specifically, it addresses the challenges in fleet management for autonomous haulers moving earth material in open-pit mining applications at construction sites. The map used to coordinate these autonomous haulers is critical in ensuring productivity and safety, with terrain friction being a key aspect. However, the current state-of-practice relies on static maps that do not support dynamic updating to reflect changes in terrain properties.To address these limitations, this thesis explores the requirements for a multilayered dynamic map and proposes their integration with the fleet management system using a standardised approach based on a digital twin framework for manufacturing. Although static maps require validation, maps populated with dynamic components necessitate an even more rigorous validation prior to implementation in real-world applications. Therefore, validation scenarios based on best practices are designed to ensure the map’s functionality under various real-world conditions. |
 | Zhao, Qianyou; Gao, Le; Wu, Duidi; Lei, Yihao; Wang, Lingyu; Qi, Jin; Hu, Jie: E-GCDT: advanced reinforcement learning with GAN-enhanced data for continuous excavation system. In: Applied Intelligence, vol. 55, no. 413, 2025. @article{nokey,
title = {E-GCDT: advanced reinforcement learning with GAN-enhanced data for continuous excavation system},
author = {Qianyou Zhao and Le Gao and Duidi Wu and Yihao Lei and Lingyu Wang and Jin Qi and Jie Hu},
url = {https://rdcu.be/d9k0a},
doi = {https://doi.org/10.1007/s10489-025-06308-5},
year = {2025},
date = {2025-01-28},
urldate = {2025-01-28},
journal = {Applied Intelligence},
volume = {55},
number = {413},
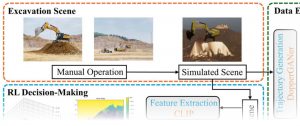
abstract = {The automation of excavator operations entails the development and implementation of systems that allow excavators to execute tasks autonomously, thereby significantly reducing the need for human intervention. By integrating advanced sensors and artificial intelligence algorithms, these systems aim to increase operational efficiency, safety, and precision in construction and mining. However, previously developed methods have two weaknesses. First, existing automated excavator systems struggle with adapting to diverse and complex environmental conditions and with precision in control mechanisms. Second, operating an excavator involves multiple, repeated decisions that need to be modeled, planned, and executed in real time. However, there is a significant lack of comprehensive datasets that reflect real-world excavation operations to support this process. In this paper, we present an innovative system named E-GCDT. This system integrates the DoppelGANger module, which generates action time series by emulating human-mined trajectories through a generative adversarial mechanism and replays them in a simulation environment, ultimately expanding the dataset to 155 continuous mining trajectories. Furthermore, E-GCDT integrates terrain features into the decision-making process with the contrastive language-image pre-training model (CLIP), in which the decision transformer optimizes trajectory planning for efficient and accurate continuous excavation tasks. E-GCDT uniquely integrates advanced data augmentation and terrain awareness, developing an advanced Markov decision framework (DT) for continuous excavation tasks. The experimental results of a bulldozer verify that the efficiency of E-GCDT surpasses human efficiency. This system sets a new standard for continuous autonomous mining, and this study provides a new perspective on the application of reinforcement learning in industrial environments.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
The automation of excavator operations entails the development and implementation of systems that allow excavators to execute tasks autonomously, thereby significantly reducing the need for human intervention. By integrating advanced sensors and artificial intelligence algorithms, these systems aim to increase operational efficiency, safety, and precision in construction and mining. However, previously developed methods have two weaknesses. First, existing automated excavator systems struggle with adapting to diverse and complex environmental conditions and with precision in control mechanisms. Second, operating an excavator involves multiple, repeated decisions that need to be modeled, planned, and executed in real time. However, there is a significant lack of comprehensive datasets that reflect real-world excavation operations to support this process. In this paper, we present an innovative system named E-GCDT. This system integrates the DoppelGANger module, which generates action time series by emulating human-mined trajectories through a generative adversarial mechanism and replays them in a simulation environment, ultimately expanding the dataset to 155 continuous mining trajectories. Furthermore, E-GCDT integrates terrain features into the decision-making process with the contrastive language-image pre-training model (CLIP), in which the decision transformer optimizes trajectory planning for efficient and accurate continuous excavation tasks. E-GCDT uniquely integrates advanced data augmentation and terrain awareness, developing an advanced Markov decision framework (DT) for continuous excavation tasks. The experimental results of a bulldozer verify that the efficiency of E-GCDT surpasses human efficiency. This system sets a new standard for continuous autonomous mining, and this study provides a new perspective on the application of reinforcement learning in industrial environments. |
 | Aoshima, Koji: High-performance autonomous wheel loading: a computational approach. 2025, ISBN: 978-91-8070-568-4. @phdthesis{nokey,
title = {High-performance autonomous wheel loading: a computational approach},
author = {Koji Aoshima},
url = {https://umu.diva-portal.org/smash/record.jsf?pid=diva2:1923171
https://umeauniversity-my.sharepoint.com/:b:/g/personal/mansen97_ad_umu_se/ERnm7ITkf7VEtmSn93r9Xp8BmiICYITOmRZtLZL_vB5wAQ?e=kCbTXg},
isbn = {978-91-8070-568-4},
year = {2025},
date = {2025-01-24},
abstract = {Smart and autonomous earthmoving equipment enhances energy efficiency,productivity, and safety at construction sites and mines. The innovations provide means to reach high-set sustainability goals and be profitable despite increasing labor shortages. In addition, recent technological breakthroughs in artificial intelligence highlight the potential of superhuman capabilities to further enhance operations. This thesis presents a computational approach to end-to-end optimization of autonomous wheel loaders operating in a dynamic environment. Wheel loaders are mainly used for repeatedly loading material and carrying it to load receivers in quarries and mines. The difficulty lies in that each loading action alters the state of the material pile. The resulting state affects the possible outcomes of the subsequent loading process and, ultimately, the total performance. Thus, the challenge is to achieve both autonomous and high-performance wheel loading over a sequence of tasks. Achieving this requires the ability to predict future outcomes and account for the cumulative effect of loading actions. The thesis constructs a real-time wheel loader simulator, develops world models for sequential loading actions with evolving pile states, formulates the end-to-end optimization problem, and introduces a look-ahead tree search method to solve the problem. These contributions provide insights into utilizing physics-based simulation in combination with machine learning to further improve sustainability in mining and construction.},
howpublished = {PhD thesis. Department of Physics, Umeå University, Sweden.},
keywords = {},
pubstate = {published},
tppubtype = {phdthesis}
}
Smart and autonomous earthmoving equipment enhances energy efficiency,productivity, and safety at construction sites and mines. The innovations provide means to reach high-set sustainability goals and be profitable despite increasing labor shortages. In addition, recent technological breakthroughs in artificial intelligence highlight the potential of superhuman capabilities to further enhance operations. This thesis presents a computational approach to end-to-end optimization of autonomous wheel loaders operating in a dynamic environment. Wheel loaders are mainly used for repeatedly loading material and carrying it to load receivers in quarries and mines. The difficulty lies in that each loading action alters the state of the material pile. The resulting state affects the possible outcomes of the subsequent loading process and, ultimately, the total performance. Thus, the challenge is to achieve both autonomous and high-performance wheel loading over a sequence of tasks. Achieving this requires the ability to predict future outcomes and account for the cumulative effect of loading actions. The thesis constructs a real-time wheel loader simulator, develops world models for sequential loading actions with evolving pile states, formulates the end-to-end optimization problem, and introduces a look-ahead tree search method to solve the problem. These contributions provide insights into utilizing physics-based simulation in combination with machine learning to further improve sustainability in mining and construction. |
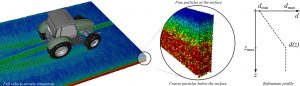 | Pogilus, Markus; Servin, Martin: Local particle refinement in terramechanical simulations. In: Journal of Terramechanics, vol. 120, pp. 101083, 2025. @article{nokey,
title = {Local particle refinement in terramechanical simulations},
author = {Markus Pogilus and Martin Servin},
url = {https://doi.org/10.1016/j.jterra.2025.101083
https://www.sciencedirect.com/science/article/pii/S0022489825000394/pdfft?md5=6d85158df2829f3f0e395a424f55466f&pid=1-s2.0-S0022489825000394-main.pdf},
doi = {10.1016/j.jterra.2025.101083},
year = {2025},
date = {2025-01-10},
urldate = {2025-01-10},
journal = { Journal of Terramechanics},
volume = {120},
pages = {101083},
abstract = {The discrete element method (DEM) is a powerful tool for simulating granular soils, but its high computational demand often results in extended simulation times. While the effect of particle size has been extensively studied, the potential benefits of spatially scaling particle sizes are less explored. We systematically investigate a local particle refinement method’s impact on reducing computational effort while maintaining accuracy. We first conduct triaxial tests to verify that bulk mechanical properties are preserved under local particle refinement. Then, we perform pressure-sinkage and shear-displacement tests, comparing our method to control simulations with homogeneous particle size. We evaluate 36 different DEM beds with varying aggressiveness in particle refinement. Our results show that this approach, depending on refinement aggressiveness, can significantly reduce particle count by 2.3 to 25 times and simulation times by 3.1 to 43 times, with normalized errors ranging from 3.5% to 11.6% compared to high-resolution reference simulations. The approach maintains a high resolution at the soil surface, where interaction is high, while allowing larger particles below the surface. The results demonstrate that substantial computational savings can be achieved without significantly compromising simulation accuracy. This method can enhance the efficiency of DEM simulations in terramechanics applications.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
The discrete element method (DEM) is a powerful tool for simulating granular soils, but its high computational demand often results in extended simulation times. While the effect of particle size has been extensively studied, the potential benefits of spatially scaling particle sizes are less explored. We systematically investigate a local particle refinement method’s impact on reducing computational effort while maintaining accuracy. We first conduct triaxial tests to verify that bulk mechanical properties are preserved under local particle refinement. Then, we perform pressure-sinkage and shear-displacement tests, comparing our method to control simulations with homogeneous particle size. We evaluate 36 different DEM beds with varying aggressiveness in particle refinement. Our results show that this approach, depending on refinement aggressiveness, can significantly reduce particle count by 2.3 to 25 times and simulation times by 3.1 to 43 times, with normalized errors ranging from 3.5% to 11.6% compared to high-resolution reference simulations. The approach maintains a high resolution at the soil surface, where interaction is high, while allowing larger particles below the surface. The results demonstrate that substantial computational savings can be achieved without significantly compromising simulation accuracy. This method can enhance the efficiency of DEM simulations in terramechanics applications. |
 | Karanfil, Deniz: Developing Scalable Digital Twins of Construction Vehicles. 2025. @phdthesis{nokey,
title = {Developing Scalable Digital Twins of Construction Vehicles},
author = {Deniz Karanfil},
url = {https://escholarship.org/uc/item/5x14q0mw
},
year = {2025},
date = {2025-01-01},
abstract = {Digital twins are computer models that can provide accurate digital representations of physical systems. They differentiate from the other forms of computer representations in that they require data from the physical system itself to be integrated into the digital system. Studies regarding the integration of digital twins in the heavy construction vehicle industry have been limited, especially in terms of physics-based digital twins and calibration of physics-based digital twins using a comprehensive set of sensors. Establishing a digital twin using physics-based simulations is not a trivial task, especially for construction vehicles due to their interactions with unknown environments at construction sites. These digital twins would require complex sensors and data acquisition systems to be integrated with the physical system to provide data for proper identification of the physics of the interactions of the machinery with the unstructured construction environments.
Another important issue is related to the fact that different sizes of vehicles may be needed to address construction needs at one or more construction sites, but the data obtained from one system cannot, in general, be scaled to other sizes of vehicles. This is especially the case when a digital model is calibrated with respect to one physical system, and then when a larger model of the physical system needs to be used for the construction task, another calibration process from physical to the digital twin is needed. In the field of construction vehicles, where there are different sizes of the same type of machinery is used, calibration of the digital twin increases both the complexity and the cost of the needed sensors and data acquisition systems for making the digital twin become a clear emulator of the physical system.
The problem of scaling is addressed in this thesis by applying and enhancing dimensional analysis methods of engineering mechanics. This work represents the development of a comprehensive, calibrated digital twin of a wheel loader by utilizing physics-based simulations. The system developed uses an extensive set of sensors and data acquisition equipment and makes use of dimensional analysis and machine learning to make the physics-based digital twin scalable from small-scale physical machines to much larger-scale machines. The framework utilizes dimensional analysis principles as well as various types of neural networks to carry out the scaling process between pre-existing small-scale vehicles and the larger-scale vehicles to minimize the effect of distorted scaling factors. A physical wheel loader is instrumented as part of this work and is used to illustrate the application of the theories developed in this thesis.},
howpublished = {Doctoral thesis - UC Davis},
keywords = {},
pubstate = {published},
tppubtype = {phdthesis}
}
Digital twins are computer models that can provide accurate digital representations of physical systems. They differentiate from the other forms of computer representations in that they require data from the physical system itself to be integrated into the digital system. Studies regarding the integration of digital twins in the heavy construction vehicle industry have been limited, especially in terms of physics-based digital twins and calibration of physics-based digital twins using a comprehensive set of sensors. Establishing a digital twin using physics-based simulations is not a trivial task, especially for construction vehicles due to their interactions with unknown environments at construction sites. These digital twins would require complex sensors and data acquisition systems to be integrated with the physical system to provide data for proper identification of the physics of the interactions of the machinery with the unstructured construction environments.
Another important issue is related to the fact that different sizes of vehicles may be needed to address construction needs at one or more construction sites, but the data obtained from one system cannot, in general, be scaled to other sizes of vehicles. This is especially the case when a digital model is calibrated with respect to one physical system, and then when a larger model of the physical system needs to be used for the construction task, another calibration process from physical to the digital twin is needed. In the field of construction vehicles, where there are different sizes of the same type of machinery is used, calibration of the digital twin increases both the complexity and the cost of the needed sensors and data acquisition systems for making the digital twin become a clear emulator of the physical system.
The problem of scaling is addressed in this thesis by applying and enhancing dimensional analysis methods of engineering mechanics. This work represents the development of a comprehensive, calibrated digital twin of a wheel loader by utilizing physics-based simulations. The system developed uses an extensive set of sensors and data acquisition equipment and makes use of dimensional analysis and machine learning to make the physics-based digital twin scalable from small-scale physical machines to much larger-scale machines. The framework utilizes dimensional analysis principles as well as various types of neural networks to carry out the scaling process between pre-existing small-scale vehicles and the larger-scale vehicles to minimize the effect of distorted scaling factors. A physical wheel loader is instrumented as part of this work and is used to illustrate the application of the theories developed in this thesis. |
2024
|
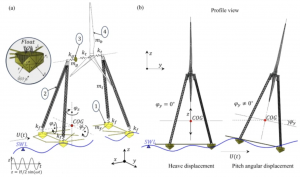 | Terrero-Gonzalez, Alicia; Dai, Saishuai; Papadopoulos, Jim; Neilson, Richard. D.; Kapitaniak, Marcin: Nonlinear analysis of hydrodynamics of a shallow-draft floating wind turbine. In: Nonlinear Dynamics, vol. 113, pp. 4511–4529, 2024. @article{nokey,
title = {Nonlinear analysis of hydrodynamics of a shallow-draft floating wind turbine},
author = {Alicia Terrero-Gonzalez and Saishuai Dai and Jim Papadopoulos and Richard. D. Neilson and Marcin Kapitaniak},
doi = {https://doi.org/10.1007/s11071-024-10424-1},
year = {2024},
date = {2024-10-16},
urldate = {2024-10-16},
journal = {Nonlinear Dynamics},
volume = {113},
pages = {4511–4529},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
|
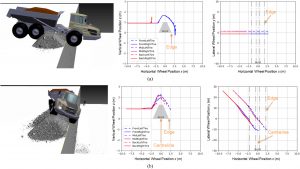 | Thoeni, Klaus; Hartmann, P; Berglund, Tomas; Servin, Martin: Edge protection along haul roads in mines and quarries: A rigorous study based on full-scale testing and numerical modelling. In: Journal of Rock Mechanics and Geotechnical Engineering, 2024, ISBN: 1674-7755. @article{Thoeni2024,
title = {Edge protection along haul roads in mines and quarries: A rigorous study based on full-scale testing and numerical modelling},
author = {Klaus Thoeni and P Hartmann and Tomas Berglund and Martin Servin},
doi = {https://doi.org/10.1016/j.jrmge.2024.10.005},
isbn = {1674-7755},
year = {2024},
date = {2024-10-11},
urldate = {2024-10-11},
journal = {Journal of Rock Mechanics and Geotechnical Engineering},
abstract = {Safety berms (also called safety bunds or windrows), widely employed in surface mining and quarry operations, are typically designed based on rules of thumb. Despite having been used by the industry for more than half a century and accidents happening regularly, their behaviour is still poorly understood. This paper challenges existing practices through a comprehensive investigation combining full-scale experiments and advanced numerical modelling. Focusing on a Volvo A45G articulated dump truck (ADT) and a CAT 773B rigid dump truck (RDT), collision scenarios under various approach conditions and different safety berm geometries and materials are rigorously examined. The calibrated numerical model is used to assess the energy absorption capacity of safety berms with different geometry and to predict a critical velocity for a specific scenario. Back analysis of an actual fatal accident indicated that an ADT adhering to the speed limit could not be stopped by the safety berm designed under current guidelines. The study highlights the importance of considering the entire geometry and the mass and volume of the material used to build the safety berm alongside the speed and approach conditions of the machinery. The findings of the study enable operators to set speed limits based on specific berm geometries or adapt safety berm designs to match speed constraints for specific machinery. This will reduce the risk of fatal accidents and improve haul road safety.},
keywords = {Algoryx, External},
pubstate = {published},
tppubtype = {article}
}
Safety berms (also called safety bunds or windrows), widely employed in surface mining and quarry operations, are typically designed based on rules of thumb. Despite having been used by the industry for more than half a century and accidents happening regularly, their behaviour is still poorly understood. This paper challenges existing practices through a comprehensive investigation combining full-scale experiments and advanced numerical modelling. Focusing on a Volvo A45G articulated dump truck (ADT) and a CAT 773B rigid dump truck (RDT), collision scenarios under various approach conditions and different safety berm geometries and materials are rigorously examined. The calibrated numerical model is used to assess the energy absorption capacity of safety berms with different geometry and to predict a critical velocity for a specific scenario. Back analysis of an actual fatal accident indicated that an ADT adhering to the speed limit could not be stopped by the safety berm designed under current guidelines. The study highlights the importance of considering the entire geometry and the mass and volume of the material used to build the safety berm alongside the speed and approach conditions of the machinery. The findings of the study enable operators to set speed limits based on specific berm geometries or adapt safety berm designs to match speed constraints for specific machinery. This will reduce the risk of fatal accidents and improve haul road safety. |
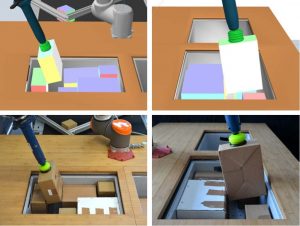 | Jongeneel, Maarten Johannes; Oliva, Alexander; Nordfeldth, Fredrik; Duarte, Ricardo; Eisinger, Steven; Sandee, Heico; Lacoursière, Claude; Saccon, Alessandro: Evaluating the Sim-to-Real Gap for Contact-Rich Robotic Manipulation Tasks using Suction Cups. 2024. @techreport{nokey,
title = {Evaluating the Sim-to-Real Gap for Contact-Rich Robotic Manipulation Tasks using Suction Cups},
author = {Maarten Johannes Jongeneel and Alexander Oliva and Fredrik Nordfeldth and Ricardo Duarte and Steven Eisinger and Heico Sandee and Claude Lacoursière and Alessandro Saccon},
url = {https://hal.science/hal-04673156/
https://hal.science/hal-04673156v1/preview/RAL_2024_Evaluating_the_Sim_to_Real_Gab_for_Contact_Rich_Robotic_Manipulation.pdf},
year = {2024},
date = {2024-08-19},
abstract = {Despite the wide adoption of suction cups in automated logistic processes, their usage for contact-rich manipulation tasks is limited. This limitation is due to unpredictable large deformations of the suction cup that can arise in contact rich tasks, making motion planning an unsolved problem. A scenario in which these type of motions occur is in bin-packing. Allowing a robot to push or squeeze items into tight spaces would increase considerably the achievable packing density of current industrial bin-packing solutions, with important economic and environmental benefits. To enable robotic systems to perform these motions, we first integrate a newly developed compact 6D suction cup model into a physics engine. We subsequently evaluate the sim-to-real gap by evaluating object pose and force/torque predictions for contact-rich manipulation tasks against experiments where object motions are tracked with an accurate motion capture system and interaction forces are recorded by means of a force/torque sensor mounted on the tool arm. We show that, by the chosen physics engine and the suction cup model, these simulations can lead to high prediction accuracy, even for large deformations of the suction cup up to 30 degrees. By combining these simulations with sufficiently intelligent motion and packing algorithms, packing density performance far superior to the current state of the art and comparable to human operators can be achieved.},
howpublished = {article preprint hal-04673156},
keywords = {},
pubstate = {published},
tppubtype = {techreport}
}
Despite the wide adoption of suction cups in automated logistic processes, their usage for contact-rich manipulation tasks is limited. This limitation is due to unpredictable large deformations of the suction cup that can arise in contact rich tasks, making motion planning an unsolved problem. A scenario in which these type of motions occur is in bin-packing. Allowing a robot to push or squeeze items into tight spaces would increase considerably the achievable packing density of current industrial bin-packing solutions, with important economic and environmental benefits. To enable robotic systems to perform these motions, we first integrate a newly developed compact 6D suction cup model into a physics engine. We subsequently evaluate the sim-to-real gap by evaluating object pose and force/torque predictions for contact-rich manipulation tasks against experiments where object motions are tracked with an accurate motion capture system and interaction forces are recorded by means of a force/torque sensor mounted on the tool arm. We show that, by the chosen physics engine and the suction cup model, these simulations can lead to high prediction accuracy, even for large deformations of the suction cup up to 30 degrees. By combining these simulations with sufficiently intelligent motion and packing algorithms, packing density performance far superior to the current state of the art and comparable to human operators can be achieved. |
 | Wiberg, Viktor; Wallin, Erik; Fälldin, Arvid; Semberg, Tobias; Rossander, Morgan; Wadbro, Eddie; Servin, Martin: Sim-to-real transfer of active suspension control using deep reinforcement learning. In: Robotics and Autonomous Systems, vol. 179, no. 104731, 2024. @article{wiberg2023sim,
title = {Sim-to-real transfer of active suspension control using deep reinforcement learning},
author = {Viktor Wiberg and Erik Wallin and Arvid Fälldin and Tobias Semberg and Morgan Rossander and Eddie Wadbro and Martin Servin},
url = {https://doi.org/10.1016/j.robot.2024.104731
https://arxiv.org/abs/2306.11171
http://umit.cs.umu.se/s2r-ascdrl/},
doi = {10.1016/j.robot.2024.104731},
year = {2024},
date = {2024-07-10},
urldate = {2024-07-10},
journal = {Robotics and Autonomous Systems},
volume = {179},
number = {104731},
abstract = {We explore sim-to-real transfer of deep reinforcement learning controllers for a heavy vehicle with active suspensions designed for traversing rough terrain. While related research primarily focuses on lightweight robots with electric motors and fast actuation, this study uses a forestry vehicle with a complex hydraulic driveline and slow actuation. We simulate the vehicle using multibody dynamics and apply system identification to find an appropriate set of simulation parameters. We then train policies in simulation using various techniques to mitigate the sim-to-real gap, including domain randomization, action delays, and a reward penalty to encourage smooth control. In reality, the policies trained with action delays and a penalty for erratic actions perform nearly at the same level as in simulation. In experiments on level ground, the motion trajectories closely overlap when turning to either side, as well as in a route tracking scenario. When faced with a ramp that requires active use of the suspensions, the simulated and real motions are in close alignment. This shows that the actuator model together with system identification yields a sufficiently accurate model of the actuators. We observe that policies trained without the additional action penalty exhibit fast switching or bang–bang control. These present smooth motions and high performance in simulation but transfer poorly to reality. We find that policies make marginal use of the local height map for perception, showing no indications of predictive planning. However, the strong transfer capabilities entail that further development concerning perception and performance can be largely confined to simulation.},
keywords = {External},
pubstate = {published},
tppubtype = {article}
}
We explore sim-to-real transfer of deep reinforcement learning controllers for a heavy vehicle with active suspensions designed for traversing rough terrain. While related research primarily focuses on lightweight robots with electric motors and fast actuation, this study uses a forestry vehicle with a complex hydraulic driveline and slow actuation. We simulate the vehicle using multibody dynamics and apply system identification to find an appropriate set of simulation parameters. We then train policies in simulation using various techniques to mitigate the sim-to-real gap, including domain randomization, action delays, and a reward penalty to encourage smooth control. In reality, the policies trained with action delays and a penalty for erratic actions perform nearly at the same level as in simulation. In experiments on level ground, the motion trajectories closely overlap when turning to either side, as well as in a route tracking scenario. When faced with a ramp that requires active use of the suspensions, the simulated and real motions are in close alignment. This shows that the actuator model together with system identification yields a sufficiently accurate model of the actuators. We observe that policies trained without the additional action penalty exhibit fast switching or bang–bang control. These present smooth motions and high performance in simulation but transfer poorly to reality. We find that policies make marginal use of the local height map for perception, showing no indications of predictive planning. However, the strong transfer capabilities entail that further development concerning perception and performance can be largely confined to simulation. |
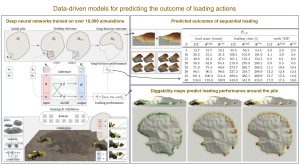 | Aoshima, Koji; Fälldin, Arvid; Wadbro, Eddie; Servin, Martin: World modeling for autonomous wheel loaders. In: Automation, vol. 5, iss. 3, pp. 259-281, 2024. @article{aoshima:2023:pmh,
title = {World modeling for autonomous wheel loaders},
author = {Koji Aoshima and Arvid Fälldin and Eddie Wadbro and Martin Servin},
url = {https://www.mdpi.com/2673-4052/5/3/16
https://www.mdpi.com/2673-4052/5/3/16/pdf
http://umit.cs.umu.se/wl-predictor/},
doi = {10.3390/automation5030016},
year = {2024},
date = {2024-07-07},
urldate = {2023-10-02},
journal = {Automation},
volume = {5},
issue = {3},
pages = {259-281},
abstract = {This paper presents a method for learning world models for wheel loaders performing automatic loading actions on a pile of soil. Data-driven models were learned to output the resulting pile state, loaded mass, time, and work for a single loading cycle given inputs that include a heightmap of the initial pile shape and action parameters for an automatic bucket-filling controller. Long-horizon planning of sequential loading in a dynamically changing environment is thus enabled as repeated model inference. The models, consisting of deep neural networks, were trained on data from a 3D multibody dynamics simulation of over 10,000 random loading actions in gravel piles of different shapes. The accuracy and inference time for predicting the loading performance and the resulting pile state were, on average, 95% in 1.2 ms and 97% in 4.5 ms, respectively. Long-horizon predictions were found feasible over 40 sequential loading actions.},
keywords = {Algoryx, External},
pubstate = {published},
tppubtype = {article}
}
This paper presents a method for learning world models for wheel loaders performing automatic loading actions on a pile of soil. Data-driven models were learned to output the resulting pile state, loaded mass, time, and work for a single loading cycle given inputs that include a heightmap of the initial pile shape and action parameters for an automatic bucket-filling controller. Long-horizon planning of sequential loading in a dynamically changing environment is thus enabled as repeated model inference. The models, consisting of deep neural networks, were trained on data from a 3D multibody dynamics simulation of over 10,000 random loading actions in gravel piles of different shapes. The accuracy and inference time for predicting the loading performance and the resulting pile state were, on average, 95% in 1.2 ms and 97% in 4.5 ms, respectively. Long-horizon predictions were found feasible over 40 sequential loading actions. |
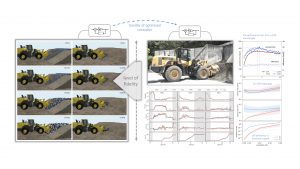 | Aoshima, Koji; Servin, Martin: Examining the simulation-to-reality gap of a wheel loader digging in deformable terrain. In: Multibody System Dynamics, 2024. @article{aoshima2023sim2real,
title = {Examining the simulation-to-reality gap of a wheel loader digging in deformable terrain},
author = {Koji Aoshima and Martin Servin},
url = {https://doi.org/10.1007/s11044-024-10005-5
https://arxiv.org/abs/2310.05765
http://umit.cs.umu.se/wl-sim-to-real/},
doi = {doi.org/10.1007/s11044-024-10005-5},
year = {2024},
date = {2024-06-30},
urldate = {2023-10-10},
journal = {Multibody System Dynamics},
abstract = {We investigate how well a physics-based simulator can replicate a real wheel loader performing bucket filling in a pile of soil. The comparison is made using field test time series of the vehicle motion and actuation forces, loaded mass, and total work. The vehicle was modeled as a rigid multibody system with frictional contacts, driveline, and linear actuators. For the soil, we tested discrete element models of different resolutions, with and without multiscale acceleration. The spatio-temporal resolution ranged between 50-400 mm and 2-500 ms, and the computational speed was between 1/10,000 to 5 times faster than real- time. The simulation-to-reality gap was found to be around 10% and exhibited a weak dependence on the level of fidelity, e.g., compatible with real-time simulation. Furthermore, the sensitivity of an optimized force feedback controller under transfer between different simulation domains was investigated. The domain bias was observed to cause a performance reduction of 5% despite the domain gap being about 15%.},
keywords = {Algoryx, External},
pubstate = {published},
tppubtype = {article}
}
We investigate how well a physics-based simulator can replicate a real wheel loader performing bucket filling in a pile of soil. The comparison is made using field test time series of the vehicle motion and actuation forces, loaded mass, and total work. The vehicle was modeled as a rigid multibody system with frictional contacts, driveline, and linear actuators. For the soil, we tested discrete element models of different resolutions, with and without multiscale acceleration. The spatio-temporal resolution ranged between 50-400 mm and 2-500 ms, and the computational speed was between 1/10,000 to 5 times faster than real- time. The simulation-to-reality gap was found to be around 10% and exhibited a weak dependence on the level of fidelity, e.g., compatible with real-time simulation. Furthermore, the sensitivity of an optimized force feedback controller under transfer between different simulation domains was investigated. The domain bias was observed to cause a performance reduction of 5% despite the domain gap being about 15%. |
 | Lyxell, Rasmus: Cable Generation from Mesh Models: Evaluating current algorithms for use in constructing cables in AGX Dynamics. Umeå University, 2024. @mastersthesis{nokey,
title = {Cable Generation from Mesh Models: Evaluating current algorithms for use in constructing cables in AGX Dynamics},
author = {Rasmus Lyxell},
url = {https://www.diva-portal.org/smash/record.jsf?pid=diva2%3A1876983&dswid=-3166},
year = {2024},
date = {2024-06-26},
urldate = {2024-06-26},
school = {Umeå University},
abstract = {Modelling objects and simulating them do not always map to each other, and often requires defining additional information outside the scope of the original model to achieve an accurate simulation. For example: cables in textit{AGX Dynamics} (a simulation library from Algoryx AB) are entirely defined by its physical parameters (e.g. Young's modulus, stiffness, etc.), radius, and the route through which the cables run. This thesis explores two approaches to closing the gap between the modelling of a cable and the creation of one in AGX Dynamics through evaluating current methods applied to generating a route and radius from a mesh.
Two methods are identified as being useful in generating a route for a cable from a mesh: one which is a surface simplification algorithm, creating approximations of models using non-manifold meshes with radii defined at each vertex, and another method which creates a skeleton from a model using the surface's curvature to gradually shrink the model into a zero-volume shape.
Both methods are evaluated using two different approaches to measuring the closeness to the original mesh from the results: using the metric introduced in the surface simplification method applied along the route, and measuring the mean distance from each point on the surface to the route.
We show a clear advantage in the first method's inherent way of approximating the radius of the model but also its lack of detail. We also demonstrate that the second method produces more detailed skeletons, but in turn has issues with skewed routes which do not follow the original mesh.
Both methods have their own advantages and disadvantages and with improvements to both radius calculations or adaptions to the fundamental algorithms, they could provide a great way of creating AGX cables from mesh models.},
keywords = {},
pubstate = {published},
tppubtype = {mastersthesis}
}
Modelling objects and simulating them do not always map to each other, and often requires defining additional information outside the scope of the original model to achieve an accurate simulation. For example: cables in textit{AGX Dynamics} (a simulation library from Algoryx AB) are entirely defined by its physical parameters (e.g. Young's modulus, stiffness, etc.), radius, and the route through which the cables run. This thesis explores two approaches to closing the gap between the modelling of a cable and the creation of one in AGX Dynamics through evaluating current methods applied to generating a route and radius from a mesh.
Two methods are identified as being useful in generating a route for a cable from a mesh: one which is a surface simplification algorithm, creating approximations of models using non-manifold meshes with radii defined at each vertex, and another method which creates a skeleton from a model using the surface's curvature to gradually shrink the model into a zero-volume shape.
Both methods are evaluated using two different approaches to measuring the closeness to the original mesh from the results: using the metric introduced in the surface simplification method applied along the route, and measuring the mean distance from each point on the surface to the route.
We show a clear advantage in the first method's inherent way of approximating the radius of the model but also its lack of detail. We also demonstrate that the second method produces more detailed skeletons, but in turn has issues with skewed routes which do not follow the original mesh.
Both methods have their own advantages and disadvantages and with improvements to both radius calculations or adaptions to the fundamental algorithms, they could provide a great way of creating AGX cables from mesh models. |
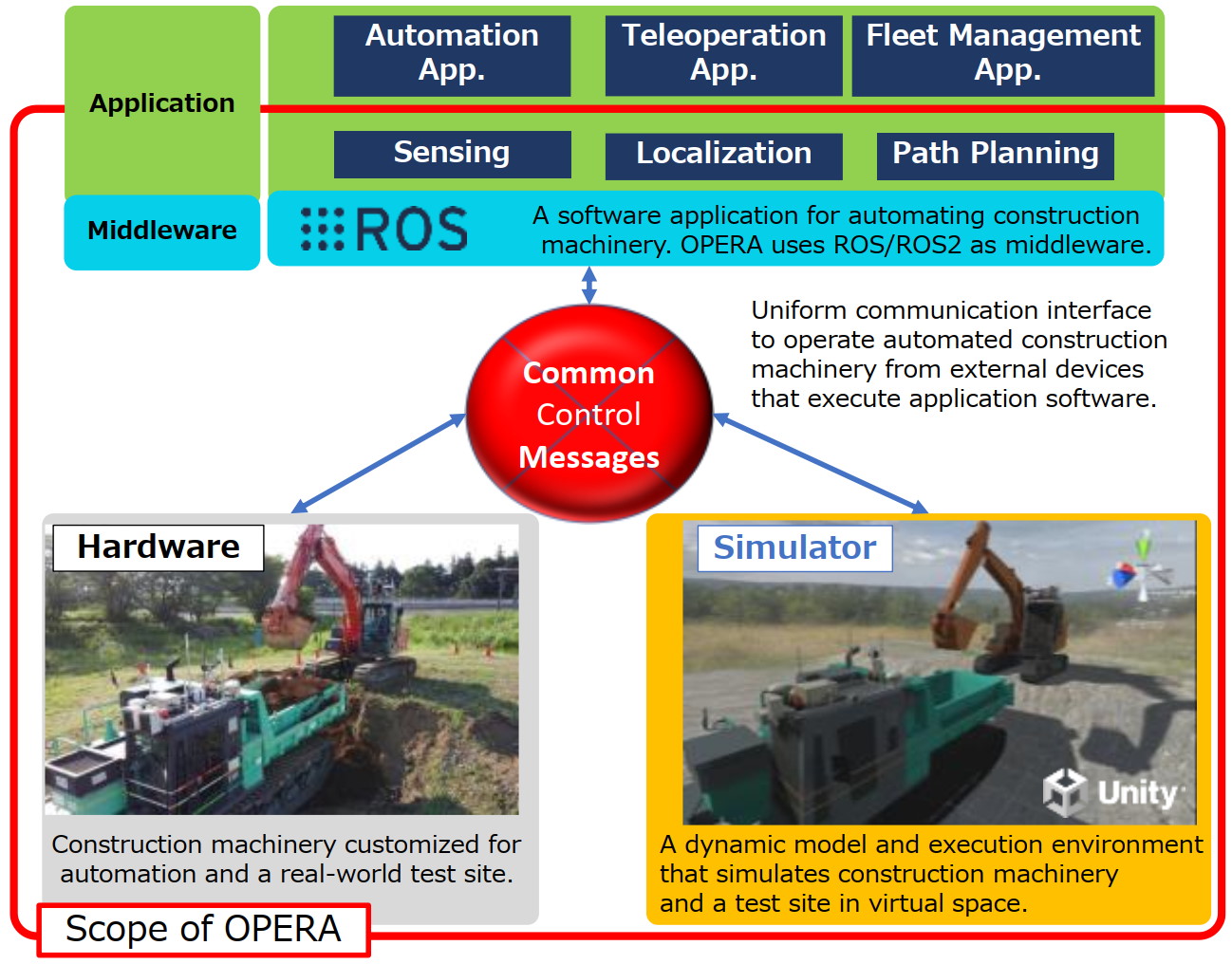 | Endo, Daisuke; Matsusaka, Yosuke; Yamauchi, Genki; Hashimoto, Takeshi: Research on an Open Source Physical Simulator for Autonomous Construction Machinery Development. In: Proceedings of the 41st International Symposium on Automation and Robotics in Construction (ISARC 2024), Lille, France, pp. 1303-1306, International Association for Automation and Robotics in Construction (IAARC), 2024, ISBN: 978-0-6458322-1-1. @inproceedings{nokey,
title = {Research on an Open Source Physical Simulator for Autonomous Construction Machinery Development},
author = {Daisuke Endo and Yosuke Matsusaka and Genki Yamauchi and Takeshi Hashimoto},
url = {https://www.iaarc.org/publications/2024_proceedings_of_the_41st_isarc_lille_france/research_on_an_open_source_physical_simulator_for_autonomous_construction_machinery_development.html
https://www.iaarc.org/publications/fulltext/168_ISARC_2024_Paper_312.pdf},
doi = {10.22260/ISARC2024/0169},
isbn = {978-0-6458322-1-1},
year = {2024},
date = {2024-06-01},
urldate = {2024-06-01},
booktitle = {Proceedings of the 41st International Symposium on Automation and Robotics in Construction (ISARC 2024), Lille, France},
pages = {1303-1306},
publisher = {International Association for Automation and Robotics in Construction (IAARC)},
abstract = {Facing a labor shortage, the civil construction industry is increasingly focused on automating machinery. The Public Works Research Institute in Japan has introduced 'OPERA,' an open development platform, to encourage stakeholder participation in areas like IT, robotics, and AI. Key to OPERA is its open-source software for model-based autonomous construction. Currently, it offers two physical simulators with distinct physics engines, enabling user-specific applications. This paper covers their technical differences, and current states.
},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Facing a labor shortage, the civil construction industry is increasingly focused on automating machinery. The Public Works Research Institute in Japan has introduced 'OPERA,' an open development platform, to encourage stakeholder participation in areas like IT, robotics, and AI. Key to OPERA is its open-source software for model-based autonomous construction. Currently, it offers two physical simulators with distinct physics engines, enabling user-specific applications. This paper covers their technical differences, and current states.
|
| Pogilus, Markus; Servin, Martin: Adaptive particle refinement in terramechanical DEM simulation. ISTVS 2024, 21st International and 12th Asia-Pacific Regional Conference of the ISTVS in Yokohama, Oct. 28-31 (2024), 2024. @conference{nokey,
title = {Adaptive particle refinement in terramechanical DEM simulation},
author = {Markus Pogilus and Martin Servin},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/Abstract_Pogilus_2024.pdf},
year = {2024},
date = {2024-05-02},
booktitle = {ISTVS 2024, 21st International and 12th Asia-Pacific Regional Conference of the ISTVS in Yokohama, Oct. 28-31 (2024)},
abstract = {DEM is computationally intensive for granular dynamics simulation, leading to a need for efficient strategies. This study explores using local particle refinement, scaling particle size based on expected spatial resolution needs, inspired by adaptive mesh refinement in FEM. Finer particles are used where intense interaction occurs, and coarser particles further away.
We hypothesize this method can maintain good accuracy while reducing particle count and computational effort. Fine particles are used on the soil bed's top, with coarser particles at greater depth, creating a particle size gradient. By adjusting the gradient we introduce a “scaling aggressiveness”, allowing control over the trade-off between efficiency and accuracy.
We use triaxial tests to verify that the method is scale invariant. Pressure-sinkage and sheardisplacement tests are then used to evaluate the method's effectiveness and accuracy in terramechanics applications. All beds were compared to a reference bed with homogenous particle size, where the mean static sinkage was 1.25 mm for a 50 kPa load. The dynamic sinkage was 73 mm for the full simulation time. For quasi-2D simulations, mild scaling aggressiveness reduced the particle count by 2-4 times with relative error up to 4% for dynamic sinkage (11% for static sinkage). For medium aggressiveness, 4-6 times reduction with relative error of 4% (19% static). For highest aggressiveness, 6-8 times reduction with relative error of 7% (29% static). The internal friction proved to be very resistant to gradient changes, with errors within 1%. When extending the model to full 3D, we estimate up to a reduction in particle count of up to a factor 25.},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
DEM is computationally intensive for granular dynamics simulation, leading to a need for efficient strategies. This study explores using local particle refinement, scaling particle size based on expected spatial resolution needs, inspired by adaptive mesh refinement in FEM. Finer particles are used where intense interaction occurs, and coarser particles further away.
We hypothesize this method can maintain good accuracy while reducing particle count and computational effort. Fine particles are used on the soil bed's top, with coarser particles at greater depth, creating a particle size gradient. By adjusting the gradient we introduce a “scaling aggressiveness”, allowing control over the trade-off between efficiency and accuracy.
We use triaxial tests to verify that the method is scale invariant. Pressure-sinkage and sheardisplacement tests are then used to evaluate the method's effectiveness and accuracy in terramechanics applications. All beds were compared to a reference bed with homogenous particle size, where the mean static sinkage was 1.25 mm for a 50 kPa load. The dynamic sinkage was 73 mm for the full simulation time. For quasi-2D simulations, mild scaling aggressiveness reduced the particle count by 2-4 times with relative error up to 4% for dynamic sinkage (11% for static sinkage). For medium aggressiveness, 4-6 times reduction with relative error of 4% (19% static). For highest aggressiveness, 6-8 times reduction with relative error of 7% (29% static). The internal friction proved to be very resistant to gradient changes, with errors within 1%. When extending the model to full 3D, we estimate up to a reduction in particle count of up to a factor 25. |
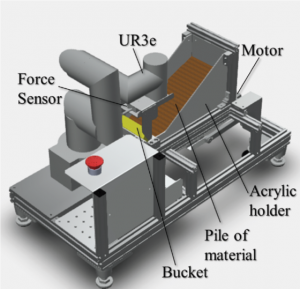 | Koyama, Motoki; Muranaka, Hiroaki; Ishikawa, Masato; Takagi, Yuki: Bayesian Optimization for Digging Control of Wheel-Loader Using Robot Manipulator. In: Journal of Robotics and Mechatronics, vol. 36, no. 2, pp. 273-283, 2024. @article{nokey,
title = {Bayesian Optimization for Digging Control of Wheel-Loader Using Robot Manipulator},
author = {Motoki Koyama and Hiroaki Muranaka and Masato Ishikawa and Yuki Takagi},
url = {https://www.jstage.jst.go.jp/article/jrobomech/36/2/36_273/_pdf},
doi = {https://doi.org/10.20965/jrm.2021.p1248},
year = {2024},
date = {2024-04-20},
urldate = {2024-04-20},
journal = {Journal of Robotics and Mechatronics},
volume = {36},
number = {2},
pages = {273-283},
abstract = {Wheel loaders are construction machines that are mainly used for excavating and loading sedimented ground into dump trucks. The objects to be excavated range from large materials, such as blast rock and crushed stone, to small materials, such as gravel, slag, and coal ash. Therefore, the excavation operation of wheel loaders requires a high skill level to cope with various terrains and soil types. As worker numbers at quarry sites decline, developing highly automated technology to replace operators is crucial. In particular, the geometry of the ground to be excavated by the wheel loader changes with each excavation, so the control parameters must be adapted sequentially during automated excavation. In this study, we proposed an online learning method using Bayesian optimization to search for control parameters from multiple trials and modify them sequentially. In particular, we formulate a multi-objective optimization problem maximizing a weighted linear combination of the payload and workload as an objective function. To validate the proposed method, we constructed an environment in which repeated digging tests can be performed using a robot manipulator with a bucket attached. Through comparative tests between feed-forward control, in which the robot moves along a fixed trajectory independent of the digging reaction force, and off-line control, in which the robot modifies the digging trajectory in response to the digging reaction force, we compared the ability of these methods to cope with terrain volume that is different from that of the optimization trial.},
keywords = {External},
pubstate = {published},
tppubtype = {article}
}
Wheel loaders are construction machines that are mainly used for excavating and loading sedimented ground into dump trucks. The objects to be excavated range from large materials, such as blast rock and crushed stone, to small materials, such as gravel, slag, and coal ash. Therefore, the excavation operation of wheel loaders requires a high skill level to cope with various terrains and soil types. As worker numbers at quarry sites decline, developing highly automated technology to replace operators is crucial. In particular, the geometry of the ground to be excavated by the wheel loader changes with each excavation, so the control parameters must be adapted sequentially during automated excavation. In this study, we proposed an online learning method using Bayesian optimization to search for control parameters from multiple trials and modify them sequentially. In particular, we formulate a multi-objective optimization problem maximizing a weighted linear combination of the payload and workload as an objective function. To validate the proposed method, we constructed an environment in which repeated digging tests can be performed using a robot manipulator with a bucket attached. Through comparative tests between feed-forward control, in which the robot moves along a fixed trajectory independent of the digging reaction force, and off-line control, in which the robot modifies the digging trajectory in response to the digging reaction force, we compared the ability of these methods to cope with terrain volume that is different from that of the optimization trial. |
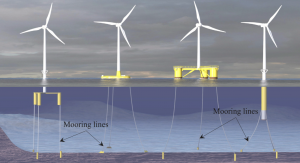 | Terrero-Gonzalez, Alicia; Dai, Saishuai; Neilson, Richard D.; Papadopoulos, Jim; Kapitaniak, Marcin: Dynamic response of a shallow-draft floating wind turbine concept: Experiments and modelling. In: Renewable Energy, vol. 226, pp. 120454, 2024. @article{nokey,
title = {Dynamic response of a shallow-draft floating wind turbine concept: Experiments and modelling},
author = {Alicia Terrero-Gonzalez and Saishuai Dai and Richard D. Neilson and Jim Papadopoulos and Marcin Kapitaniak},
url = {https://www.sciencedirect.com/science/article/pii/S0960148124005196},
doi = {doi.org/10.1016/j.renene.2024.120454},
year = {2024},
date = {2024-04-05},
urldate = {2024-04-05},
journal = {Renewable Energy},
volume = {226},
pages = {120454},
abstract = {This paper considers the dynamic response of a novel lightweight FOWT concept being developed by T-Omega Wind Ltd, that is able to float over even steep high waves, and be economical in deep water. The study aims to understand the response to waves during marine operations (installation, or maintenance) as part of optimizing its design. For this purpose real-time 6 degrees-of-freedom (6 DOF) simulations are computed for the system under operational and extreme sea wave scenarios in the state-of-the-art Multiphysics Marine Simulator at the National Decommissioning Centre (NDC). RAOs for heave and pitch displacements are evaluated across varying wave heights and periods of excitation to identify system behaviour including resonant frequencies. The model is calibrated by adjusting system damping parameters for each wave frequency to match experimental tests on a 1:60 scaled prototype at the Kelvin Hydrodynamics Laboratory, resulting in an ad hoc damping expression to produce appropriate system dynamic behaviour for “High” and “Low” Sea States. The study concludes by identifying ranges of wave parameters that limit peak motions, proposes analytical expressions for RAO responses and provides damping parameters that validate the Marine Simulator as a suitable tool to predict FOWT dynamic responses with reduced computation time.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
This paper considers the dynamic response of a novel lightweight FOWT concept being developed by T-Omega Wind Ltd, that is able to float over even steep high waves, and be economical in deep water. The study aims to understand the response to waves during marine operations (installation, or maintenance) as part of optimizing its design. For this purpose real-time 6 degrees-of-freedom (6 DOF) simulations are computed for the system under operational and extreme sea wave scenarios in the state-of-the-art Multiphysics Marine Simulator at the National Decommissioning Centre (NDC). RAOs for heave and pitch displacements are evaluated across varying wave heights and periods of excitation to identify system behaviour including resonant frequencies. The model is calibrated by adjusting system damping parameters for each wave frequency to match experimental tests on a 1:60 scaled prototype at the Kelvin Hydrodynamics Laboratory, resulting in an ad hoc damping expression to produce appropriate system dynamic behaviour for “High” and “Low” Sea States. The study concludes by identifying ranges of wave parameters that limit peak motions, proposes analytical expressions for RAO responses and provides damping parameters that validate the Marine Simulator as a suitable tool to predict FOWT dynamic responses with reduced computation time. |
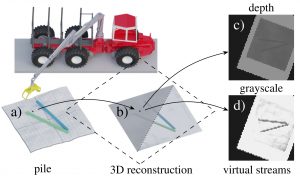 | Wallin, Erik; Wiberg, Viktor; Servin, Martin: Multi-log grasping using reinforcement learning and virtual visual servoing. In: Robotics , vol. 13, iss. 1, no. 3, 2024. @article{wallin2023multi,
title = {Multi-log grasping using reinforcement learning and virtual visual servoing},
author = {Erik Wallin and Viktor Wiberg and Martin Servin},
url = {https://www.mdpi.com/2218-6581/13/1/3
https://arxiv.org/abs/2309.02997
http://umit.cs.umu.se/multi-log-grasping/},
doi = {10.3390/robotics13010003},
year = {2024},
date = {2024-01-30},
urldate = {2023-09-15},
journal = {Robotics },
volume = {13},
number = {3},
issue = {1},
abstract = {We explore multi-log grasping using reinforcement learning and virtual visual servoing for automated forwarding. Automation of forest processes is a major challenge, and many techniques regarding robot control pose different challenges due to the unstructured and harsh outdoor environment. Grasping multiple logs involves problems of dynamics and path planning, where the interaction between the grapple, logs, terrain, and obstacles requires visual information. To address these challenges, we separate image segmentation from crane control and utilize a virtual camera to provide an image stream from 3D reconstructed data. We use Cartesian control to simplify domain transfer. Since log piles are static, visual servoing using a 3D reconstruction of the pile and its surroundings is equivalent to using real camera data until the point of grasping. This relaxes the limit on computational resources and time for the challenge of image segmentation, and allows for collecting data in situations where the log piles are not occluded. The disadvantage is the lack of information during grasping. We demonstrate that this problem is manageable and present an agent that is 95% successful in picking one or several logs from challenging piles of 2-5 logs.},
keywords = {External},
pubstate = {published},
tppubtype = {article}
}
We explore multi-log grasping using reinforcement learning and virtual visual servoing for automated forwarding. Automation of forest processes is a major challenge, and many techniques regarding robot control pose different challenges due to the unstructured and harsh outdoor environment. Grasping multiple logs involves problems of dynamics and path planning, where the interaction between the grapple, logs, terrain, and obstacles requires visual information. To address these challenges, we separate image segmentation from crane control and utilize a virtual camera to provide an image stream from 3D reconstructed data. We use Cartesian control to simplify domain transfer. Since log piles are static, visual servoing using a 3D reconstruction of the pile and its surroundings is equivalent to using real camera data until the point of grasping. This relaxes the limit on computational resources and time for the challenge of image segmentation, and allows for collecting data in situations where the log piles are not occluded. The disadvantage is the lack of information during grasping. We demonstrate that this problem is manageable and present an agent that is 95% successful in picking one or several logs from challenging piles of 2-5 logs. |
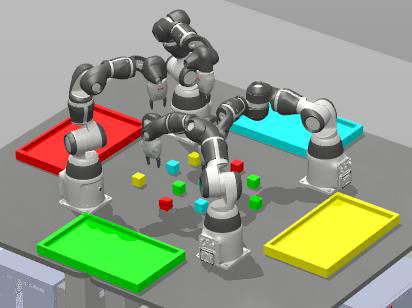 | Mateu-Gomez, Daniel; Martínez-Peral, Francisco José; Perez-Vidal, Carlos: Multi-Arm Trajectory Planning for Optimal Collision-Free Pick-and-Place Operations. In: Technologies, vol. 12, iss. 1, no. 12, 2024. @article{nokey,
title = {Multi-Arm Trajectory Planning for Optimal Collision-Free Pick-and-Place Operations},
author = {Daniel Mateu-Gomez and Francisco José Martínez-Peral and Carlos Perez-Vidal},
url = {https://www.mdpi.com/2227-7080/12/1/12#},
doi = {https://doi.org/10.3390/technologies12010012},
year = {2024},
date = {2024-01-22},
urldate = {2024-01-22},
journal = {Technologies},
volume = {12},
number = {12},
issue = {1},
abstract = {This article addresses the problem of automating a multi-arm pick-and-place robotic system. The objective is to optimize the execution time of a task simultaneously performed by multiple robots, sharing the same workspace, and determining the order of operations to be performed. Due to its ability to address decision-making problems of all kinds, the system is modeled under the mathematical framework of the Markov Decision Process (MDP). In this particular work, the model is adjusted to a deterministic, single-agent, and fully observable system, which allows for its comparison with other resolution methods such as graph search algorithms and Planning Domain Definition Language (PDDL). The proposed approach provides three advantages: it plans the trajectory to perform the task in minimum time; it considers how to avoid collisions between robots; and it automatically generates the robot code for any robot manufacturer and any initial objects’ positions in the workspace. The result meets the objectives and is a fast and robust system that can be safely employed in a production line.},
keywords = {External},
pubstate = {published},
tppubtype = {article}
}
This article addresses the problem of automating a multi-arm pick-and-place robotic system. The objective is to optimize the execution time of a task simultaneously performed by multiple robots, sharing the same workspace, and determining the order of operations to be performed. Due to its ability to address decision-making problems of all kinds, the system is modeled under the mathematical framework of the Markov Decision Process (MDP). In this particular work, the model is adjusted to a deterministic, single-agent, and fully observable system, which allows for its comparison with other resolution methods such as graph search algorithms and Planning Domain Definition Language (PDDL). The proposed approach provides three advantages: it plans the trajectory to perform the task in minimum time; it considers how to avoid collisions between robots; and it automatically generates the robot code for any robot manufacturer and any initial objects’ positions in the workspace. The result meets the objectives and is a fast and robust system that can be safely employed in a production line. |
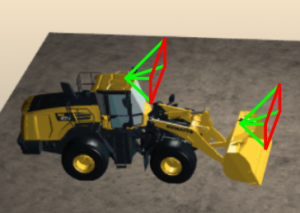 | Lee, Vint; Abbeel, Pieter; Lee, Youngwoon: DreamSmooth: Improving Model-based Reinforcement Learning via Reward Smoothing. In: The Twelfth International Conference on Learning Representations, 2024. @inproceedings{nokey,
title = {DreamSmooth: Improving Model-based Reinforcement Learning via Reward Smoothing},
author = {Vint Lee and Pieter Abbeel and Youngwoon Lee},
url = {https://openreview.net/forum?id=GruDNzQ4ux
https://arxiv.org/pdf/2311.01450.pdf},
year = {2024},
date = {2024-01-16},
urldate = {2024-01-16},
booktitle = {The Twelfth International Conference on Learning Representations},
abstract = {Model-based reinforcement learning (MBRL) has gained much attention for its ability to learn complex behaviors in a sample-efficient way: planning actions by generating imaginary trajectories with predicted rewards. Despite its success, we found that surprisingly, reward prediction is often a bottleneck of MBRL, especially for sparse rewards that are challenging (or even ambiguous) to predict. Motivated by the intuition that humans can learn from rough reward estimates, we propose a simple yet effective reward smoothing approach, DreamSmooth, which learns to predict a temporally-smoothed reward, instead of the exact reward at the given timestep. We empirically show that DreamSmooth achieves state-of-the-art performance on long-horizon sparse-reward tasks both in sample efficiency and final performance without losing performance on common benchmarks, such as Deepmind Control Suite and Atari benchmarks.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
Model-based reinforcement learning (MBRL) has gained much attention for its ability to learn complex behaviors in a sample-efficient way: planning actions by generating imaginary trajectories with predicted rewards. Despite its success, we found that surprisingly, reward prediction is often a bottleneck of MBRL, especially for sparse rewards that are challenging (or even ambiguous) to predict. Motivated by the intuition that humans can learn from rough reward estimates, we propose a simple yet effective reward smoothing approach, DreamSmooth, which learns to predict a temporally-smoothed reward, instead of the exact reward at the given timestep. We empirically show that DreamSmooth achieves state-of-the-art performance on long-horizon sparse-reward tasks both in sample efficiency and final performance without losing performance on common benchmarks, such as Deepmind Control Suite and Atari benchmarks. |
2023
|
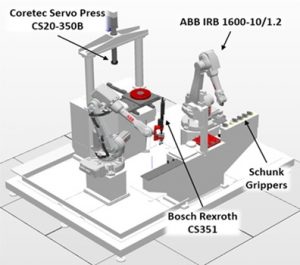 | Raffaeli, Roberto; Neri, Federico; Peruzzini, Margherita; Berselli, Giovanni; Pellicciari, Marcello: Advanced virtual prototyping of robotic cells using physics-based simulation. In: International Journal on Interactive Design and Manufacturing, vol. 18, pp. 981–996, 2023. @article{,
title = {Advanced virtual prototyping of robotic cells using physics-based simulation},
author = {Roberto Raffaeli and Federico Neri and Margherita Peruzzini and Giovanni Berselli and Marcello Pellicciari},
doi = {https://doi.org/10.1007/s12008-023-01677-y},
year = {2023},
date = {2023-12-19},
urldate = {2023-12-19},
journal = {International Journal on Interactive Design and Manufacturing},
volume = {18},
pages = {981–996},
abstract = {Robotic cells are complex mechatronic systems whose final performance is determined by the interaction of the control logics with the mechanical behavior of the process. In this context it is fundamental to develop engineering methods and tools for the virtual prototyping of the cells that emulate both contributions. With such mechatronic digital models, it would be possible to replicate the real behavior of the systems and to optimize the cell productivity, up to building complete digital twins. This paper proposes an engineering method to develop realistic Virtual Prototypes of robotic cells including their geometry, operating logic, performance, and physical behavior. A case study on a robotic cell composed of two anthropomorphic robots for the flexible process of automatic assembly of industrial parts is presented to demonstrate the approach.},
keywords = {External},
pubstate = {published},
tppubtype = {article}
}
Robotic cells are complex mechatronic systems whose final performance is determined by the interaction of the control logics with the mechanical behavior of the process. In this context it is fundamental to develop engineering methods and tools for the virtual prototyping of the cells that emulate both contributions. With such mechatronic digital models, it would be possible to replicate the real behavior of the systems and to optimize the cell productivity, up to building complete digital twins. This paper proposes an engineering method to develop realistic Virtual Prototypes of robotic cells including their geometry, operating logic, performance, and physical behavior. A case study on a robotic cell composed of two anthropomorphic robots for the flexible process of automatic assembly of industrial parts is presented to demonstrate the approach. |
 | Iovino, Matteo; Styrud, Jonathan; Smith, Pietro Falco; Christian: A Framework for Learning Behavior Trees in Collaborative Robotic Applications. In: 2023 IEEE 19th International Conference on Automation Science and Engineering (CASE), pp. 1-8, 2023. @inproceedings{nokey,
title = {A Framework for Learning Behavior Trees in Collaborative Robotic Applications},
author = {Matteo Iovino and Jonathan Styrud and Pietro Falco; Christian Smith},
doi = {https://doi.org/10.1109/CASE56687.2023.10260363},
year = {2023},
date = {2023-09-28},
urldate = {2023-09-28},
booktitle = {2023 IEEE 19th International Conference on Automation Science and Engineering (CASE)},
pages = {1-8},
abstract = {In modern industrial collaborative robotic applications, it is desirable to create robot programs automatically, intuitively, and time-efficiently. Moreover, robots need to be controlled by reactive policies to face the unpredictability of the environment they operate in. In this paper we propose a framework that combines a method that learns Behavior Trees (BTs) from demonstration with a method that evolves them with Genetic Programming (GP) for collaborative robotic applications. The main contribution of this paper is to show that by combining the two learning methods we obtain a method that allows non-expert users to semi-automatically, time-efficiently, and interactively generate BTs. We validate the framework with a series of manipulation experiments. The BT is fully learnt in simulation and then transferred to a real collaborative robot.},
keywords = {External},
pubstate = {published},
tppubtype = {inproceedings}
}
In modern industrial collaborative robotic applications, it is desirable to create robot programs automatically, intuitively, and time-efficiently. Moreover, robots need to be controlled by reactive policies to face the unpredictability of the environment they operate in. In this paper we propose a framework that combines a method that learns Behavior Trees (BTs) from demonstration with a method that evolves them with Genetic Programming (GP) for collaborative robotic applications. The main contribution of this paper is to show that by combining the two learning methods we obtain a method that allows non-expert users to semi-automatically, time-efficiently, and interactively generate BTs. We validate the framework with a series of manipulation experiments. The BT is fully learnt in simulation and then transferred to a real collaborative robot. |
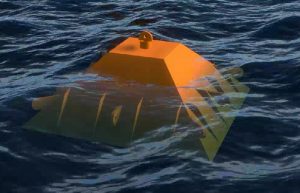 | Martinez, Rodrigo; Arnau, Sergi; Scullion, Callum; Collins, Paddy; Neilson, Richard D; Kapitaniak, Marcin: Variable buoyancy anchor deployment analysis for floating wind applications using a Marine Simulator. In: Ocean Engineering, vol. 285, pp. 115417, 2023, ISSN: 0029-8018. @article{MARTINEZ2023115417,
title = {Variable buoyancy anchor deployment analysis for floating wind applications using a Marine Simulator},
author = {Rodrigo Martinez and Sergi Arnau and Callum Scullion and Paddy Collins and Richard D Neilson and Marcin Kapitaniak},
url = {https://www.sciencedirect.com/science/article/pii/S0029801823018012},
doi = {https://doi.org/10.1016/j.oceaneng.2023.115417},
issn = {0029-8018},
year = {2023},
date = {2023-07-16},
journal = {Ocean Engineering},
volume = {285},
pages = {115417},
abstract = {To study the feasibility of deploying a novel type of anchor with variable buoyancy for mooring floating offshore wind turbines, a set of detailed modelling studies was performed in the state of-the-art Marine Simulator at the National Decommissioning Centre. The aim of the multiphysics simulations is to assess fully a proposed craneless deployment method that involves towing the anchor from the harbour to the installation site, pumping liquid ballast to overcome anchor’s buoyancy and lowering it to the seabed using only a winch, thereby simplifying the process, and reducing installation costs. As a test case, a novel shape of the floating anchor is considered, to establish the feasibility of its deployment in conjunction with the variable buoyancy technology and installation sequence. The analysis is divided into three sections: characterisation of the anchor buoyancy, positioning the anchor under the stern of the vessel and the controlled descent of the anchor to the seabed, under varying weather and operational conditions (e.g significant wave height, current, winch velocity, liquid ballast mass, ballast pump rate). The analysis allows assessment of the importance of the different factors affecting the proposed deployment scenario of variable buoyancy anchors, such as the winch velocity, the ballast mass and the pump rate.},
keywords = {External},
pubstate = {published},
tppubtype = {article}
}
To study the feasibility of deploying a novel type of anchor with variable buoyancy for mooring floating offshore wind turbines, a set of detailed modelling studies was performed in the state of-the-art Marine Simulator at the National Decommissioning Centre. The aim of the multiphysics simulations is to assess fully a proposed craneless deployment method that involves towing the anchor from the harbour to the installation site, pumping liquid ballast to overcome anchor’s buoyancy and lowering it to the seabed using only a winch, thereby simplifying the process, and reducing installation costs. As a test case, a novel shape of the floating anchor is considered, to establish the feasibility of its deployment in conjunction with the variable buoyancy technology and installation sequence. The analysis is divided into three sections: characterisation of the anchor buoyancy, positioning the anchor under the stern of the vessel and the controlled descent of the anchor to the seabed, under varying weather and operational conditions (e.g significant wave height, current, winch velocity, liquid ballast mass, ballast pump rate). The analysis allows assessment of the importance of the different factors affecting the proposed deployment scenario of variable buoyancy anchors, such as the winch velocity, the ballast mass and the pump rate. |
 | Nishita, Seikoh: String Figure Simulation with Multiresolution Wire Model. In: Proceedings of the 2023 12th International Conference on Software and Computer Applications, pp. 65–70, Association for Computing Machinery, New York, NY, USA, 2023, ISBN: 9781450398589. @inproceedings{nokey,
title = {String Figure Simulation with Multiresolution Wire Model},
author = {Seikoh Nishita},
doi = {https://doi.org/10.1145/3587828.3587839},
isbn = {9781450398589},
year = {2023},
date = {2023-06-20},
urldate = {2023-06-20},
booktitle = {Proceedings of the 2023 12th International Conference on Software and Computer Applications},
pages = {65–70},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
series = {ICSCA '23},
abstract = {String figure is a traditional game with a loop of a string played by hooking and/or unhooking strands of the loop from fingers to produce patterns representing certain objects. The patterns of the string figure change dynamically by the string manipulations by fingers. A computer-based method based on knot theory has been proposed to make string figure patterns. This method represents a string in the string figure as an extended knot diagram and generates string figure patterns by monotonically decreasing the number of crossing points. However, there are string figures where this method does not make the patterns correctly. In contrast, this paper proposes a method using physical simulation from the viewpoint that the string figure patterns are determined according to the tension and frictional force applied to the string. To evaluate the proposed method, we conducted two types of experiments. In the first experiments, we showed that physical simulations using an adaptive multi-resolution wire model have sufficient capability to compute the string figure patterns. In the second, we conducted experiments to make patterns for instances of the string figure. The experimental results indicate that the proposed method can correctly make the string figure patterns in most cases. We also found that the proposed method can make some of the string figure patterns that cannot be generated by conventional methods.},
keywords = {External},
pubstate = {published},
tppubtype = {inproceedings}
}
String figure is a traditional game with a loop of a string played by hooking and/or unhooking strands of the loop from fingers to produce patterns representing certain objects. The patterns of the string figure change dynamically by the string manipulations by fingers. A computer-based method based on knot theory has been proposed to make string figure patterns. This method represents a string in the string figure as an extended knot diagram and generates string figure patterns by monotonically decreasing the number of crossing points. However, there are string figures where this method does not make the patterns correctly. In contrast, this paper proposes a method using physical simulation from the viewpoint that the string figure patterns are determined according to the tension and frictional force applied to the string. To evaluate the proposed method, we conducted two types of experiments. In the first experiments, we showed that physical simulations using an adaptive multi-resolution wire model have sufficient capability to compute the string figure patterns. In the second, we conducted experiments to make patterns for instances of the string figure. The experimental results indicate that the proposed method can correctly make the string figure patterns in most cases. We also found that the proposed method can make some of the string figure patterns that cannot be generated by conventional methods. |
 | Jongeneel, Maarten Johannes; Poort, Luuk; van de Wouw, Nathan; Saccon, Alessandro: Experimental Validation of Nonsmooth Dynamics Simulations for Robotic Tossing involving Friction and Impacts. 2023, (working paper or preprint). @unpublished{jongeneel:hal-03974604,
title = {Experimental Validation of Nonsmooth Dynamics Simulations for Robotic Tossing involving Friction and Impacts},
author = {Maarten Johannes Jongeneel and Luuk Poort and Nathan van de Wouw and Alessandro Saccon},
url = {https://hal.science/hal-03974604},
year = {2023},
date = {2023-02-23},
abstract = {In this paper, we evaluate the prediction performance of two nonsmooth rigid-body dynamics simulators on realworld data with spatial impacts in the context of robotic tossing and visual tracking. We perform a parameter identification procedure to find the coefficient of friction and restitution of different objects via a velocity-based and trajectory-based cost function. Our results show that these two identification criteria lead to different parameter values, and these criteria should be chosen in consideration of the application at hand. We compare the simulated predicted rest-pose with measurement data and perform a sensitivity analysis to assess how uncertainty on the identified parameters affects the rest-pose prediction of the object. For the robotic tossing application at hand, we show that the rest-pose prediction is insensitive to the coefficient of restitution, and accurate predictions are obtained via simulations using only ballistic motion and friction.},
note = {working paper or preprint},
keywords = {External},
pubstate = {published},
tppubtype = {unpublished}
}
In this paper, we evaluate the prediction performance of two nonsmooth rigid-body dynamics simulators on realworld data with spatial impacts in the context of robotic tossing and visual tracking. We perform a parameter identification procedure to find the coefficient of friction and restitution of different objects via a velocity-based and trajectory-based cost function. Our results show that these two identification criteria lead to different parameter values, and these criteria should be chosen in consideration of the application at hand. We compare the simulated predicted rest-pose with measurement data and perform a sensitivity analysis to assess how uncertainty on the identified parameters affects the rest-pose prediction of the object. For the robotic tossing application at hand, we show that the rest-pose prediction is insensitive to the coefficient of restitution, and accurate predictions are obtained via simulations using only ballistic motion and friction. |
2022
|
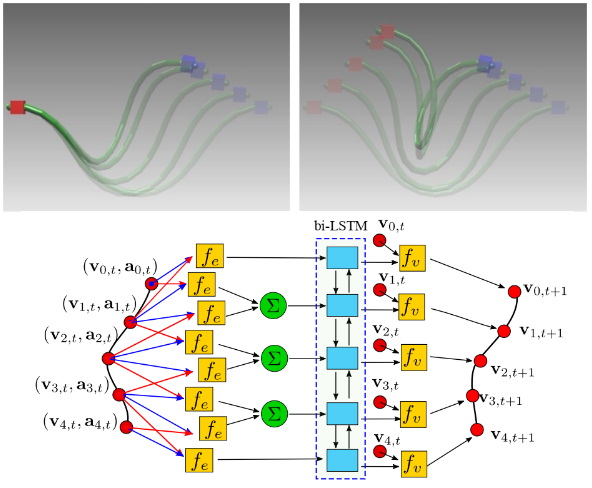 | Yang, Yuxuan; Stork, Johannes A.; Stoyanov, Todor: Online Model Learning for Shape Control of Deformable Linear Objects. In: 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 4056-4062, 2022. @article{yang2022,
title = {Online Model Learning for Shape Control of Deformable Linear Objects},
author = {Yuxuan Yang and Johannes A. Stork and Todor Stoyanov},
url = {https://ieeexplore.ieee.org/document/9981080},
doi = {10.1109/IROS47612.2022.9981080},
year = {2022},
date = {2022-12-26},
journal = {2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {4056-4062},
abstract = {Traditional approaches to manipulating the state of deformable linear objects (DLOs) - i.e., cables, ropes - rely on model-based planning. However, constructing an accurate dynamic model of a DLO is challenging due to the complexity of interactions and a high number of degrees of freedom. This renders the task of achieving a desired DLO shape particularly difficult and motivates the use of model-free alternatives, which while maintaining generality suffer from a high sample complexity. In this paper, we bridge the gap between these fundamentally different approaches and propose a framework that learns dynamic models of DLOs through trial-and-error interaction. Akin to model-based reinforcement learning (RL), we interleave learning and exploration to solve a 3D shape control task for a DLO. Our approach requires only a fraction of the interaction samples of the current state-of-the-art model-free RL alternatives to achieve superior shape control performance. Unlike offline model learning, our approach does not require expert knowledge for data collection, retains the ability to explore, and automatically selects relevant experience.},
keywords = {External},
pubstate = {published},
tppubtype = {article}
}
Traditional approaches to manipulating the state of deformable linear objects (DLOs) - i.e., cables, ropes - rely on model-based planning. However, constructing an accurate dynamic model of a DLO is challenging due to the complexity of interactions and a high number of degrees of freedom. This renders the task of achieving a desired DLO shape particularly difficult and motivates the use of model-free alternatives, which while maintaining generality suffer from a high sample complexity. In this paper, we bridge the gap between these fundamentally different approaches and propose a framework that learns dynamic models of DLOs through trial-and-error interaction. Akin to model-based reinforcement learning (RL), we interleave learning and exploration to solve a 3D shape control task for a DLO. Our approach requires only a fraction of the interaction samples of the current state-of-the-art model-free RL alternatives to achieve superior shape control performance. Unlike offline model learning, our approach does not require expert knowledge for data collection, retains the ability to explore, and automatically selects relevant experience. |
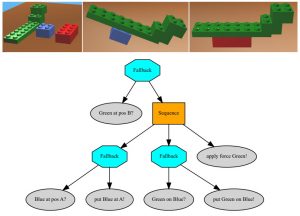 | Styrud, Jonathan; Iovino, Matteo; Norrlöf, Mikael; Björkman, Mårten; Smith, Christian: Combining planning and learning of behavior trees for robotic assembly. In: 2022 International Conference on Robotics and Automation (ICRA), pp. 11511–11517, IEEE, 2022. @inproceedings{styrud2022combining,
title = {Combining planning and learning of behavior trees for robotic assembly},
author = {Styrud, Jonathan and Iovino, Matteo and Norrlöf, Mikael and Björkman, Mårten and Smith, Christian},
url = {https://ieeexplore.ieee.org/abstract/document/9812086
https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9812086},
doi = {10.1109/ICRA46639.2022.9812086},
year = {2022},
date = {2022-10-01},
booktitle = {2022 International Conference on Robotics and Automation (ICRA)},
pages = {11511--11517},
publisher = {IEEE},
abstract = {Industrial robots can solve tasks in controlled environments, but modern applications require robots able to operate also in unpredictable surroundings. An increasingly popular reactive policy architecture in robotics is Behavior Trees (BTs) but as other architectures, programming time drives cost and limits flexibility. The two main branches of algorithms to generate policies automatically, automated planning and machine learning, both have their own drawbacks and have not previously been combined for generation of BTs. We propose a method for creating BTs by combining these branches, inserting the result of an automated planner into the population of a Genetic Programming algorithm. Experiments confirm that the proposed method performs well on a variety of robotic assembly problems and outperforms the base methods used separately. We also show that this high level learning of Behavior Trees can be transferred to a real system without further training.},
keywords = {External},
pubstate = {published},
tppubtype = {inproceedings}
}
Industrial robots can solve tasks in controlled environments, but modern applications require robots able to operate also in unpredictable surroundings. An increasingly popular reactive policy architecture in robotics is Behavior Trees (BTs) but as other architectures, programming time drives cost and limits flexibility. The two main branches of algorithms to generate policies automatically, automated planning and machine learning, both have their own drawbacks and have not previously been combined for generation of BTs. We propose a method for creating BTs by combining these branches, inserting the result of an automated planner into the population of a Genetic Programming algorithm. Experiments confirm that the proposed method performs well on a variety of robotic assembly problems and outperforms the base methods used separately. We also show that this high level learning of Behavior Trees can be transferred to a real system without further training. |
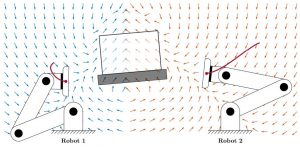 | Cosgun, A; van Steen,: Impact-aware dual-arm grasping through time-invariant reference spreading. In: 2022. @article{cosgunimpact,
title = {Impact-aware dual-arm grasping through time-invariant reference spreading},
author = {Cosgun, A and van Steen},
url = {https://pure.tue.nl/ws/portalfiles/portal/224201404/1020574_Impact_aware_grasping_through_time_invariant_reference_spreading.pdf},
year = {2022},
date = {2022-10-01},
abstract = {Eindhoven University of Technology},
abstract = {In robotic applications which involve handling objects or interaction with the environment,
robots generally establish contact at near-zero speed due to the effect of impacts. At impact, rapid velocity changes occur in the robot joints accompanied by large contact forces,
which can cause damage to the robot, humans, or the environment. As a result, robots
typically accelerate and decelerate repeatedly to achieve a task that involves contact, which
negatively affects the energy consumption and throughput. In order to increase the performance, control strategies are proposed that take into account the impact dynamics, which
are referred to as impact-aware control. Impact-aware control strategies exploit impacts, to
increase the swiftness of the performed tasks and reach a more human-like behavior. One
of the challenges in impact-aware control strategies is that, in presence of uncertainties, a
robot can experience an impact at a different time than expected. This causes the actual
state of the system to reside in a different mode than prescribed by the time-based reference
trajectory, which can cause the robot to compensate aggressively and possibly becoming unstable. Furthermore, when contact is expected to be established at multiple contact points
simultaneously, the controller can enter an unspecified and typically unpredictable mode.
Lastly, in case of external perturbations, the robot can lag behind compared to its reference
state at that time instant, which would cause the robot to “catch up” in order to reach its
desired state, which would generally be undesired.
The combination of a time-invariant control strategies and an impact-aware reference spreading control strategy can provide a possible solution for these challenges. By employing a reference that is solely a function of the robot’s position and orientation, and extending it around
an expected impact position, robots can be controlled towards an intentional impact in the
presence of uncertainties. Therefore, the goal of this project is to design an impact-aware
time-invariant reference spreading control strategy for a dual-arm robotic system capable
of swift grasping. To achieve this, a procedure is proposed to generate time-invariant references that can steer the robots towards a desired position and speed to swiftly grasp an
object, while ensuring the reference is compatible through the impact dynamics. In order
to be applicable on a dual-arm robotic system, the time-invariant reference spreading control strategy is cast into a task-based quadratic-programming control framework, which is
a common framework for control of complex systems. Furthermore, an intermediate mode
control strategy is proposed to ensure full contact is established when a loss of simultaneity
occurs. Additionally, a synchronization strategy is formulated to ensure the robots reach
the object at the same time. Finally, the effectiveness of the proposed control approach is
validated by means of numerical simulation studies on a two-dimensional, and a more complex three-dimensional scenario, which consists of a realistic seven degrees of freedom robot
setup.},
keywords = {External},
pubstate = {published},
tppubtype = {article}
}
Eindhoven University of Technology},
abstract = {In robotic applications which involve handling objects or interaction with the environment,
robots generally establish contact at near-zero speed due to the effect of impacts. At impact, rapid velocity changes occur in the robot joints accompanied by large contact forces,
which can cause damage to the robot, humans, or the environment. As a result, robots
typically accelerate and decelerate repeatedly to achieve a task that involves contact, which
negatively affects the energy consumption and throughput. In order to increase the performance, control strategies are proposed that take into account the impact dynamics, which
are referred to as impact-aware control. Impact-aware control strategies exploit impacts, to
increase the swiftness of the performed tasks and reach a more human-like behavior. One
of the challenges in impact-aware control strategies is that, in presence of uncertainties, a
robot can experience an impact at a different time than expected. This causes the actual
state of the system to reside in a different mode than prescribed by the time-based reference
trajectory, which can cause the robot to compensate aggressively and possibly becoming unstable. Furthermore, when contact is expected to be established at multiple contact points
simultaneously, the controller can enter an unspecified and typically unpredictable mode.
Lastly, in case of external perturbations, the robot can lag behind compared to its reference
state at that time instant, which would cause the robot to “catch up” in order to reach its
desired state, which would generally be undesired.
The combination of a time-invariant control strategies and an impact-aware reference spreading control strategy can provide a possible solution for these challenges. By employing a reference that is solely a function of the robot’s position and orientation, and extending it around
an expected impact position, robots can be controlled towards an intentional impact in the
presence of uncertainties. Therefore, the goal of this project is to design an impact-aware
time-invariant reference spreading control strategy for a dual-arm robotic system capable
of swift grasping. To achieve this, a procedure is proposed to generate time-invariant references that can steer the robots towards a desired position and speed to swiftly grasp an
object, while ensuring the reference is compatible through the impact dynamics. In order
to be applicable on a dual-arm robotic system, the time-invariant reference spreading control strategy is cast into a task-based quadratic-programming control framework, which is
a common framework for control of complex systems. Furthermore, an intermediate mode
control strategy is proposed to ensure full contact is established when a loss of simultaneity
occurs. Additionally, a synchronization strategy is formulated to ensure the robots reach
the object at the same time. Finally, the effectiveness of the proposed control approach is
validated by means of numerical simulation studies on a two-dimensional, and a more complex three-dimensional scenario, which consists of a realistic seven degrees of freedom robot
setup. |
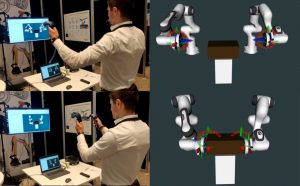 | van Oorschot, S. P. M.: Design and numerical validation of a dual-arm telerobotic simulation for object grabbing. Eindhoven University of Technology, 2022. @mastersthesis{Oorschot2022,
title = {Design and numerical validation of a dual-arm telerobotic simulation for object grabbing},
author = {van Oorschot, S.P.M.},
url = {https://pure.tue.nl/ws/portalfiles/portal/211664977/1014209_Oorschot.pdf},
year = {2022},
date = {2022-10-01},
school = {Eindhoven University of Technology},
abstract = {Currently, most robots in the parcel industry manipulate objects by making contact with a
near-zero velocity, limiting their movement to pick-and-place actions. The incorporation of
impacts, i.e., making contact with non-zero velocity, in the control of robots can extend the
robot’s actions with grabbing, which improves the throughput of such systems.
The control of robots during impact requires the use of novel control algorithms, for which
an estimation of the robot’s impact behavior is required. The application and development
of such control algorithms, and the study towards robot impacts in order to improve such
estimations are both subjected to the impulsive nature of impacts, and the complications
that arise consequentially. First of all, impacting with robots poses a safety hazard for both
the operator, the robot, and the environment, as impacts are often paired with quick changes
in velocity, peaking forces, and peaking torques. Second of all, the generation of reference
trajectories for robotic grabbing is time-consuming and undextrous, which raises the need
for a more human-oriented method of instructing robot reference trajectories.
In this work, a software framework is developed which aims at tackling both of the aforementioned problems. This framework combines the human capability of trajectory planning
and of performing swift grabbing actions by controlling the robot setup via teleoperation.
The teleoperated reference trajectories control a QP controller, which interacts with a simulation of the robot scene which mimics real life physics, allowing preliminary testing to be
conducted on this virtual system. Experiments are conducted to test the usability of the teleoperation system. Furthermore, to illustrate that the system can indeed aid in development
of novel control techniques and impact behavior estimations, experiments are conducted
which focus on the effect of the robot posture and the end effector impact location on the
impact behavior of the system. Results show that the developed system is intuitive to use,
and that the robot elbow pose and the location of the impact have a significant effect on the
robot’s impact behavior.},
keywords = {External},
pubstate = {published},
tppubtype = {mastersthesis}
}
Currently, most robots in the parcel industry manipulate objects by making contact with a
near-zero velocity, limiting their movement to pick-and-place actions. The incorporation of
impacts, i.e., making contact with non-zero velocity, in the control of robots can extend the
robot’s actions with grabbing, which improves the throughput of such systems.
The control of robots during impact requires the use of novel control algorithms, for which
an estimation of the robot’s impact behavior is required. The application and development
of such control algorithms, and the study towards robot impacts in order to improve such
estimations are both subjected to the impulsive nature of impacts, and the complications
that arise consequentially. First of all, impacting with robots poses a safety hazard for both
the operator, the robot, and the environment, as impacts are often paired with quick changes
in velocity, peaking forces, and peaking torques. Second of all, the generation of reference
trajectories for robotic grabbing is time-consuming and undextrous, which raises the need
for a more human-oriented method of instructing robot reference trajectories.
In this work, a software framework is developed which aims at tackling both of the aforementioned problems. This framework combines the human capability of trajectory planning
and of performing swift grabbing actions by controlling the robot setup via teleoperation.
The teleoperated reference trajectories control a QP controller, which interacts with a simulation of the robot scene which mimics real life physics, allowing preliminary testing to be
conducted on this virtual system. Experiments are conducted to test the usability of the teleoperation system. Furthermore, to illustrate that the system can indeed aid in development
of novel control techniques and impact behavior estimations, experiments are conducted
which focus on the effect of the robot posture and the end effector impact location on the
impact behavior of the system. Results show that the developed system is intuitive to use,
and that the robot elbow pose and the location of the impact have a significant effect on the
robot’s impact behavior. |
