2015
|
 | Nordberg, John; Servin, Martin; Bergsten, Urban: Modeling and validation of an elastoplastic terrain model for simulation of forestry machines. 11th World Congress on Computational Mechanics (WCCM XI), July 20 - 25, 2014, Barcelona, Spain, 2015. @conference{nordberg1modeling,
title = {Modeling and validation of an elastoplastic terrain model for simulation of forestry machines},
author = {John Nordberg and Martin Servin and Urban Bergsten},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/abstract_terrain_WCCMXI.pdf},
year = {2015},
date = {2015-07-20},
booktitle = {11th World Congress on Computational Mechanics (WCCM XI), July 20 - 25, 2014, Barcelona, Spain},
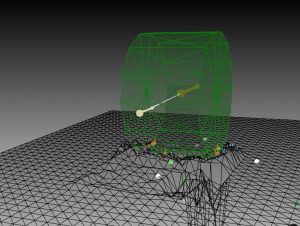
abstract = {A framework for non-smooth multidomain mechanics [1] is applied to develop real time interactive simulation of a forest machine. These are used for exploration and evaluation of new designs of machines, tools and work methods in forestry with the possibility to measure productivity [2], fuel economy, ground damages and mobility [3].
The framework has recently been extended to include dynamical terrain, modeled as an elastoplastic solid using particle based discretization similar to [4] [5]. A capped plasticity model [6] [5] is employed to include the effects of soil compaction in the terrain.
In the present study we describe a mapping of existing terrain measurements [7] [8] [9] to the developed elastoplastic terrain model and numerical scheme. We also propose test system and procedures for parameter identification and for validation. The test systems include simple plate or cone tests as well as full vehicles equipped with industry standard wheels and tracked bogies. Finally, we present preliminary results from simulations of forestry machines with different type of tracked bogies.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {conference}
}
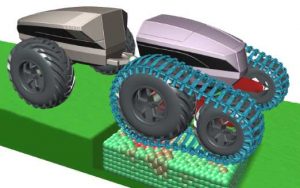
A framework for non-smooth multidomain mechanics [1] is applied to develop real time interactive simulation of a forest machine. These are used for exploration and evaluation of new designs of machines, tools and work methods in forestry with the possibility to measure productivity [2], fuel economy, ground damages and mobility [3].
The framework has recently been extended to include dynamical terrain, modeled as an elastoplastic solid using particle based discretization similar to [4] [5]. A capped plasticity model [6] [5] is employed to include the effects of soil compaction in the terrain.
In the present study we describe a mapping of existing terrain measurements [7] [8] [9] to the developed elastoplastic terrain model and numerical scheme. We also propose test system and procedures for parameter identification and for validation. The test systems include simple plate or cone tests as well as full vehicles equipped with industry standard wheels and tracked bogies. Finally, we present preliminary results from simulations of forestry machines with different type of tracked bogies. |
 | Wang, Da: Accelerated granular matter simulation. Umeå University, 2015. @phdthesis{wang2015accelerated,
title = {Accelerated granular matter simulation},
author = {Da Wang},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/Wang_Accelerated%20granular%20matter%20simulation.pdf
http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-110164
https://youtu.be/HPb-TNT2YNQ},
year = {2015},
date = {2015-01-01},
school = {Umeå University},
abstract = {Modeling and simulation of granular matter has important applications in both natural science and industry. One widely used method is the discrete element method (DEM). It can be used for simulating granular matter in the gaseous, liquid as well as solid regime whereas alternative methods are in general applicable to only one. Discrete element analysis of large systems is, however, limited by long computational time. A number of solutions to radically improve the computational efficiency of DEM simulations are developed and analysed. These include treating the material as a nonsmooth dynamical system and methods for reducing the computational effort for solving the complementarity problem that arise from implicit treatment of the contact laws. This allow for large time-step integration and ultimately more and faster simulation studies or analysis of more complex systems. Acceleration methods that can reduce the computational complexity and degrees of freedom have been invented. These solutions are investigated in numerical experiments, validated using experimental data and applied for design exploration of iron ore pelletising systems.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {phdthesis}
}
Modeling and simulation of granular matter has important applications in both natural science and industry. One widely used method is the discrete element method (DEM). It can be used for simulating granular matter in the gaseous, liquid as well as solid regime whereas alternative methods are in general applicable to only one. Discrete element analysis of large systems is, however, limited by long computational time. A number of solutions to radically improve the computational efficiency of DEM simulations are developed and analysed. These include treating the material as a nonsmooth dynamical system and methods for reducing the computational effort for solving the complementarity problem that arise from implicit treatment of the contact laws. This allow for large time-step integration and ultimately more and faster simulation studies or analysis of more complex systems. Acceleration methods that can reduce the computational complexity and degrees of freedom have been invented. These solutions are investigated in numerical experiments, validated using experimental data and applied for design exploration of iron ore pelletising systems. |
 | Servin, Martin; Berglund, Tomas; Mickelsson, Kjell-Ove; Rönnbäck, Stefan; Wang, Da: Modeling and simulation of a granulation system using a nonsmooth discrete element method. In: ECCOMAS IV international conference on particle-based methods 2015, 2015. @inproceedings{servin2015modeling,
title = {Modeling and simulation of a granulation system using a nonsmooth discrete element method},
author = {Martin Servin and Tomas Berglund and Kjell-Ove Mickelsson and Stefan Rönnbäck and Da Wang},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/granulationsystem.pdf
http://umit.cs.umu.se/modsimcomplmech/docs/papers/granulation_system.pdf},
year = {2015},
date = {2015-01-01},
booktitle = {ECCOMAS IV international conference on particle-based methods 2015},
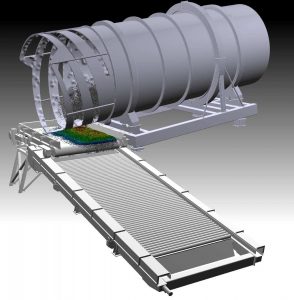
abstract = {Granulation is the process of forming macroscopic granules, e.g. tablets or pellets, from microscopic particles. A common system for continuous granulation consist of a rotary drum or disc, a sieve and chrusher connected in a circuit by a number of conveyors. The granulation occur in the drum (or disc) and the main mechanisms are nucleation, layering, coalescence and breakage [1]. The process can be controlled by drum velocity and feed rate of fine material, binding agencies and moisture. The geometric design of components affect the material flow and thus the sieving capacity and ultimately the production capacity. Many granulation plants operate well below their capacity and suffer from high recycle rates and dynamic instabilities [2].
The main challenge of modelling and simulation of granulation processes is the occurrence of multiple length and time scales. The traditional approaches are typically focused either the largescale level of processing units or on the microscale level of particles. A complete model of a granulation process need to include also the intermediate scale of granule dynamics [1]. This is, however, a very challenging computational task given the vast number of granules, typically many millions or more.
We present a meso-scale approach to modeling and simulating iron ore granulation systems with granules modeled as nonsmooth discrete elements (NDEM) [3-6]. This extend a previous iron ore granule model [7] used for balling drum outlet design simulation [8]. Ore fines and moisture is modeled by a quasiparticle model for slurry [9]. Interaction models for nucleation, layering, coalescence and breakage are proposed and tested in a virtual balling circuit. The computational performance is analysed and different methods for accelerating the NDEM computations are tested.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
Granulation is the process of forming macroscopic granules, e.g. tablets or pellets, from microscopic particles. A common system for continuous granulation consist of a rotary drum or disc, a sieve and chrusher connected in a circuit by a number of conveyors. The granulation occur in the drum (or disc) and the main mechanisms are nucleation, layering, coalescence and breakage [1]. The process can be controlled by drum velocity and feed rate of fine material, binding agencies and moisture. The geometric design of components affect the material flow and thus the sieving capacity and ultimately the production capacity. Many granulation plants operate well below their capacity and suffer from high recycle rates and dynamic instabilities [2].
The main challenge of modelling and simulation of granulation processes is the occurrence of multiple length and time scales. The traditional approaches are typically focused either the largescale level of processing units or on the microscale level of particles. A complete model of a granulation process need to include also the intermediate scale of granule dynamics [1]. This is, however, a very challenging computational task given the vast number of granules, typically many millions or more.
We present a meso-scale approach to modeling and simulating iron ore granulation systems with granules modeled as nonsmooth discrete elements (NDEM) [3-6]. This extend a previous iron ore granule model [7] used for balling drum outlet design simulation [8]. Ore fines and moisture is modeled by a quasiparticle model for slurry [9]. Interaction models for nucleation, layering, coalescence and breakage are proposed and tested in a virtual balling circuit. The computational performance is analysed and different methods for accelerating the NDEM computations are tested. |
 | Nordberg, John; Servin, Martin: Meshfree elastoplastic solid for nonsmooth multidomain dynamics. In: arXiv preprint arXiv:1611.03741, 2015. @article{nordberg2015meshfree,
title = {Meshfree elastoplastic solid for nonsmooth multidomain dynamics},
author = {John Nordberg and Martin Servin},
url = {https://arxiv.org/abs/1611.03741
https://arxiv.org/abs/1611.03741
},
year = {2015},
date = {2015-01-01},
journal = {arXiv preprint arXiv:1611.03741},
abstract = {A method for simulation of elastoplastic solids in multibody systems with nonsmooth and multidomain dynamics is developed. The solid is discretised into pseudo-particles using the meshfree moving least squares method. The particles carry strain and stress tensor variables that are mapped to deformation constraints and constraint forces. The discretised solid model thus fit a unified framework for nonsmooth multidomain dynamics for realtime simulations including strong coupling of rigid multibodies with complex kinematic constraints such as articulation joints, unilateral contacts with dry friction, drivelines and hydraulics. The nonsmooth formulation allow for impulses, due to impacts for instance, to propagate instantly between the rigid multibody and the solid. Plasticity is introduced through an associative perfectly plastic modified Drucker-Prager model. The elastic and plastic dynamics is verified for simple test systems and the capability of simulating tracked terrain vehicles driving on a deformable terrain is demonstrated.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
A method for simulation of elastoplastic solids in multibody systems with nonsmooth and multidomain dynamics is developed. The solid is discretised into pseudo-particles using the meshfree moving least squares method. The particles carry strain and stress tensor variables that are mapped to deformation constraints and constraint forces. The discretised solid model thus fit a unified framework for nonsmooth multidomain dynamics for realtime simulations including strong coupling of rigid multibodies with complex kinematic constraints such as articulation joints, unilateral contacts with dry friction, drivelines and hydraulics. The nonsmooth formulation allow for impulses, due to impacts for instance, to propagate instantly between the rigid multibody and the solid. Plasticity is introduced through an associative perfectly plastic modified Drucker-Prager model. The elastic and plastic dynamics is verified for simple test systems and the capability of simulating tracked terrain vehicles driving on a deformable terrain is demonstrated. |
 | Hatledal, Lars Ivar; Schaathun, Hans Georg; Zhang, Houxiang: A software architecture for simulation and visualisation based on the functional mock-up interface and web technologies. In: Proceedings of The 57th Conference on Simulation and Modelling (SIMS 56): October, 7-9, 2015, Linköping University, Sweden, Linköping University Electronic Press, Linköpings universitet 2015. @inproceedings{hatledal2015software,
title = {A software architecture for simulation and visualisation based on the functional mock-up interface and web technologies},
author = {Lars Ivar Hatledal and Hans Georg Schaathun and Houxiang Zhang},
url = {https://www.researchgate.net/profile/Hans-Georg-Schaathun/publication/300217936_A_Software_Architecture_for_Simulation_and_Visualisation_based_on_the_Functional_Mock-up_Interface_and_Web_Technologies/links/575a9bc108aec91374a603fd/A-Software-Architecture-for-Simulation-and-Visualisation-based-on-the-Functional-Mock-up-Interface-and-Web-Technologies.pdf
},
doi = {10.3384/ecp15119123},
year = {2015},
date = {2015-01-01},
booktitle = {Proceedings of The 57th Conference on Simulation and Modelling (SIMS 56): October, 7-9, 2015, Linköping University, Sweden},
organization = {Linköping University Electronic Press, Linköpings universitet},
abstract = {This paper presents a software architecture for a collabora-tive virtual environment (CVE) for simulation and visual-isation based on the Functional Mock-up Interface (FMI)for co-simulation and web technologies. FMI has beenchosen in order to have a standardised and independentinterface to models created in different modelling tools.The user interface has been implemented using webtechnologies, which enables a very high degree of flexi-bility. The Web Graphics Library (WebGL) is used for in-teractive 3D visualisations, enabling native cross-platformrendering directly in the browser without the need ofinstalling any additional plug-ins. Employing the bi-directional communication capabilities of the WebSocketprotocol, multiple users can interact with the same simu-lation models simultaneously.A software prototype has been developed in order todemonstrate the applicability of the proposed architecture.As a case study, we have considered virtual prototypingof marine cranes, to illustrate the use on real world prob-lems.},
keywords = {External},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper presents a software architecture for a collabora-tive virtual environment (CVE) for simulation and visual-isation based on the Functional Mock-up Interface (FMI)for co-simulation and web technologies. FMI has beenchosen in order to have a standardised and independentinterface to models created in different modelling tools.The user interface has been implemented using webtechnologies, which enables a very high degree of flexi-bility. The Web Graphics Library (WebGL) is used for in-teractive 3D visualisations, enabling native cross-platformrendering directly in the browser without the need ofinstalling any additional plug-ins. Employing the bi-directional communication capabilities of the WebSocketprotocol, multiple users can interact with the same simu-lation models simultaneously.A software prototype has been developed in order todemonstrate the applicability of the proposed architecture.As a case study, we have considered virtual prototypingof marine cranes, to illustrate the use on real world prob-lems. |
 | Wang, Da; Servin, Martin; Berglund, Tomas; Mickelsson, Kjell-Ove; Rönnbäck, Stefan: Parametrization and validation of a nonsmooth discrete element method for simulating flows of iron ore green pellets. In: Powder Technology, vol. 283, pp. 475-487, 2015, ISSN: 0032-5910. @article{WANG2015475,
title = {Parametrization and validation of a nonsmooth discrete element method for simulating flows of iron ore green pellets},
author = {Da Wang and Martin Servin and Tomas Berglund and Kjell-Ove Mickelsson and Stefan Rönnbäck},
url = {https://www.sciencedirect.com/science/article/pii/S0032591015004350
http://umit.cs.umu.se/modsimcomplmech/docs/papers/particle_validation.pdf
https://www.youtube.com/watch?v=SzHfdWj7PfQ&spfreload=10
http://umit.cs.umu.se/granular/video/
},
doi = {https://doi.org/10.1016/j.powtec.2015.05.040},
issn = {0032-5910},
year = {2015},
date = {2015-01-01},
journal = {Powder Technology},
volume = {283},
pages = {475-487},
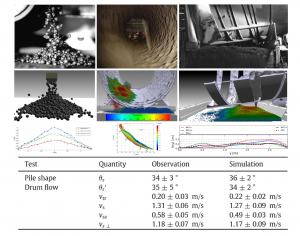
abstract = {The nonsmooth discrete element method (NDEM) has the potential of high computational efficiency for rapid exploration of large design space of systems for processing and transportation of mineral ore. We present parametrization, verification and validation of a simulation model based on NDEM for iron ore green pellet flow in balling circuits. Simulations are compared with camera based measurements of individual pellet motion as well as bulk behavior of pellets on conveyors and in rotating balling drum. It is shown that the NDEM simulation model is applicable for the purpose of analysis, design and control of iron ore pelletizing systems. The sensitivity to model and simulation parameters is investigated. It is found that: the errors associated with large time-step integration do not cause statistically significant errors to the bulk behavior; rolling resistance is a necessary model component; and the outlet flow from the drum is sensitive to fine material adhering to the outlet creating a thick coating that narrows the outlet gaps.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
The nonsmooth discrete element method (NDEM) has the potential of high computational efficiency for rapid exploration of large design space of systems for processing and transportation of mineral ore. We present parametrization, verification and validation of a simulation model based on NDEM for iron ore green pellet flow in balling circuits. Simulations are compared with camera based measurements of individual pellet motion as well as bulk behavior of pellets on conveyors and in rotating balling drum. It is shown that the NDEM simulation model is applicable for the purpose of analysis, design and control of iron ore pelletizing systems. The sensitivity to model and simulation parameters is investigated. It is found that: the errors associated with large time-step integration do not cause statistically significant errors to the bulk behavior; rolling resistance is a necessary model component; and the outlet flow from the drum is sensitive to fine material adhering to the outlet creating a thick coating that narrows the outlet gaps. |
 | Lacoursière, Claude; Linde, Mattias; Lu, Ying; Trinkle, Jeff: A framework for data exchange and benchmarking of frictional contact solvers in multibody dynamics. In: ECCOMAS Thematic Conference on Multibody Dynamics, pp. 2–3, 2015. @inproceedings{lacoursiere2015framework,
title = {A framework for data exchange and benchmarking of frictional contact solvers in multibody dynamics},
author = {Claude Lacoursière and Mattias Linde and Ying Lu and Jeff Trinkle},
url = {https://foswiki.cs.rpi.edu/foswiki/pub/RoboticsWeb/LabPublications/LacoursiereLindeLuTrinkle-paper.pdf},
year = {2015},
date = {2015-01-01},
booktitle = {ECCOMAS Thematic Conference on Multibody Dynamics},
pages = {2--3},
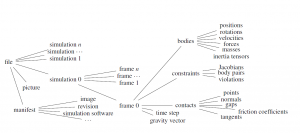
abstract = {We present an HDF5 layout specification to store and exchange the run-time kinematic data of simulations of contacting multibody systems subject to dry friction in descriptor form. This is intended to be used to test solvers on the incremental problem defined by one single configuration, allowing any mathematical formulation and friction law, and compatible with any numerical method. We also introduce metrics to measure the quality of a solution comprehensively. We started a public web site with a collection of problems, from simple stacking to full vehicle dynamics as well as grasping robots. We provide software to manipulate the data, assemble matrices needed for different formulations, interface with existing solvers, and to compute our metrics. As this is written in MATLAB and OCTAVE we believe our contributions will allow anyone wanting to write or test a solver to work with “real life” examples without any difficulty, and concentrate on the numerical methods themselves, and get results before writing a code suitable for integration with a full featured software package.
},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
We present an HDF5 layout specification to store and exchange the run-time kinematic data of simulations of contacting multibody systems subject to dry friction in descriptor form. This is intended to be used to test solvers on the incremental problem defined by one single configuration, allowing any mathematical formulation and friction law, and compatible with any numerical method. We also introduce metrics to measure the quality of a solution comprehensively. We started a public web site with a collection of problems, from simple stacking to full vehicle dynamics as well as grasping robots. We provide software to manipulate the data, assemble matrices needed for different formulations, interface with existing solvers, and to compute our metrics. As this is written in MATLAB and OCTAVE we believe our contributions will allow anyone wanting to write or test a solver to work with “real life” examples without any difficulty, and concentrate on the numerical methods themselves, and get results before writing a code suitable for integration with a full featured software package.
|
 | Agvik, Simon: A deformable terrain model in multi-domain dynamics using elastoplastic constraints: An adaptive approach. Department of Physics, Umeå University, 2015. @mastersthesis{Agvik2015,
title = {A deformable terrain model in multi-domain dynamics using elastoplastic constraints: An adaptive approach},
author = {Simon Agvik},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-108328
http://umu.diva-portal.org/smash/get/diva2:852371/FULLTEXT01.pdf},
year = {2015},
date = {2015-01-01},
school = {Department of Physics, Umeå University},
abstract = {Achieving realistic simulations of terrain vehicles in their work environment does not only require a careful model of the vehicle itself but the vehicle's interactions with the surroundings are equally important. For off-road ground vehicles the terrain will heavily affect the behaviour of the vehicle and thus puts great demands on the terrain model.
The purpose of this project has been to develop and evaluate a deformable terrain model, meant to be used in real-time simulations with multi-body dynamics. The proposed approach is a modification of an existing elastoplastic model based on linear elasticity theory and a capped Drucker-Prager model, using it in an adaptive way. The original model can be seen as a system of rigid bodies connected by elastoplastic constraints, representing the terrain. This project investigates if it is possible to create dynamic bodies just when it is absolutely necessary, and store information about possible deformations in a grid.
Two methods used for transferring information between the dynamic bodies and the grid have been evaluated; an interpolating approach and a discrete approach. The test results indicate that the interpolating approach is preferable, with better stability to an equal performance cost. However, stability problems still exist that have to be solved if the model should be useful in a commercial product.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Achieving realistic simulations of terrain vehicles in their work environment does not only require a careful model of the vehicle itself but the vehicle's interactions with the surroundings are equally important. For off-road ground vehicles the terrain will heavily affect the behaviour of the vehicle and thus puts great demands on the terrain model.
The purpose of this project has been to develop and evaluate a deformable terrain model, meant to be used in real-time simulations with multi-body dynamics. The proposed approach is a modification of an existing elastoplastic model based on linear elasticity theory and a capped Drucker-Prager model, using it in an adaptive way. The original model can be seen as a system of rigid bodies connected by elastoplastic constraints, representing the terrain. This project investigates if it is possible to create dynamic bodies just when it is absolutely necessary, and store information about possible deformations in a grid.
Two methods used for transferring information between the dynamic bodies and the grid have been evaluated; an interpolating approach and a discrete approach. The test results indicate that the interpolating approach is preferable, with better stability to an equal performance cost. However, stability problems still exist that have to be solved if the model should be useful in a commercial product. |
 | Pettersson, Thomas: Analysis and implementation of the Smooth Discrete Element Method in AGX. Faculty of Science & Engineering, Linköping University, 2015. @mastersthesis{Pettersson2015,
title = {Analysis and implementation of the Smooth Discrete Element Method in AGX},
author = {Thomas Pettersson},
editor = {Thomas Pettersson},
url = {http://liu.diva-portal.org/smash/get/diva2:856766/FULLTEXT02.pdf
http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aliu%3Adiva-121563},
year = {2015},
date = {2015-01-01},
school = {Faculty of Science & Engineering, Linköping University},
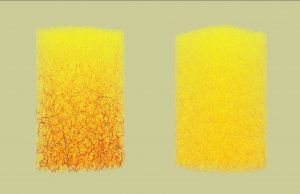
abstract = {We encounter granular materials on a daily basis. We walk up a gravel path or we eat our breakfast cereals. When handling granular materials on an industrial scale it is important to do so efficiently, to avoid unnecessary energy losses, wear and tear. To help designing efficient tools for handling these materials engineers uses numerical simulations.
This project investigates the difference between the two main approaches to simulation of granular materials, the Smooth- and Non-smooth Discrete Element Methods by implementing the Smooth method into AgX dynamics were the Non-smooth method already is implemented, and then setup and execute a range of experiments to investigate their differences.
The investigation shows both advantages and weaknesses for both methods. The result of simulations with smooth discrete element method are more consistent than with the nonsmooth discrete element method with respect to choice of time step and other parameters that can be chosen for the simulation. Smooth discrete element method have problems when it comes to extreme situations.
The relative simulation time for system as large as treated by this project (more than1000) can not be shown to depend on the size of the system.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
We encounter granular materials on a daily basis. We walk up a gravel path or we eat our breakfast cereals. When handling granular materials on an industrial scale it is important to do so efficiently, to avoid unnecessary energy losses, wear and tear. To help designing efficient tools for handling these materials engineers uses numerical simulations.
This project investigates the difference between the two main approaches to simulation of granular materials, the Smooth- and Non-smooth Discrete Element Methods by implementing the Smooth method into AgX dynamics were the Non-smooth method already is implemented, and then setup and execute a range of experiments to investigate their differences.
The investigation shows both advantages and weaknesses for both methods. The result of simulations with smooth discrete element method are more consistent than with the nonsmooth discrete element method with respect to choice of time step and other parameters that can be chosen for the simulation. Smooth discrete element method have problems when it comes to extreme situations.
The relative simulation time for system as large as treated by this project (more than1000) can not be shown to depend on the size of the system. |
 | Sandqvist, Jonas: Collision detection using boundary representation, BREP. Department of Physics, Umeå University, 2015. @mastersthesis{Sandqvist2015,
title = {Collision detection using boundary representation, BREP},
author = {Jonas Sandqvist},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-102531
http://umu.diva-portal.org/smash/get/diva2:808317/FULLTEXT01.pdf
},
year = {2015},
date = {2015-01-01},
school = {Department of Physics, Umeå University},
abstract = {This thesis treats how to generate collision information for multibody simulations in AgX Dynamicswhere the geometries are described with the data structure boundary representation, BREP. BREP is adata structure that contains the exact mathematical description of each individual surface. To describecomplex surfaces exact and efficient non uniform rational basis spline, NURBS, is used and for trivialsurfaces like planes or spheres simpler equations is used. Since all surfaces in a BREP is described veryaccurate, the accuracy for the collision information can be set high without affecting the amount of dataneeded to describe the geometries.To make AgX Dynamics able to calculate forces in a multibody simulation, collision informationabout were and how much two geometries are intersecting is required. The collision information containswere the overlap between two geometries is, how much the objects have penetrated each other and thedirection for which the objects have to separate. To find the penetration depth and the overlap theNewton Raphson method were used. The experiments conducted, showed that it is possible to useBREPs as a description of geometries to produce the collision information needed for the physics engineused by AgX Dynamics to handle collisions. A comparison between trimesh and BREP for producingthe collision information, shows that data usage is much lower for the representation of geometries withBREPs than trimesh. The results also shows that the accuracy can be significantly higher than fortrimesh as the data usage for trimesh becomes non practical to handle when the required accuracy ishigh. With the high accuracy and with the smooth surfaces used with the BREP the artificial friction isalmost negligible except for cases were intersection points could not be found all around the intersectioncurves due to limitations in the algorithm.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
This thesis treats how to generate collision information for multibody simulations in AgX Dynamicswhere the geometries are described with the data structure boundary representation, BREP. BREP is adata structure that contains the exact mathematical description of each individual surface. To describecomplex surfaces exact and efficient non uniform rational basis spline, NURBS, is used and for trivialsurfaces like planes or spheres simpler equations is used. Since all surfaces in a BREP is described veryaccurate, the accuracy for the collision information can be set high without affecting the amount of dataneeded to describe the geometries.To make AgX Dynamics able to calculate forces in a multibody simulation, collision informationabout were and how much two geometries are intersecting is required. The collision information containswere the overlap between two geometries is, how much the objects have penetrated each other and thedirection for which the objects have to separate. To find the penetration depth and the overlap theNewton Raphson method were used. The experiments conducted, showed that it is possible to useBREPs as a description of geometries to produce the collision information needed for the physics engineused by AgX Dynamics to handle collisions. A comparison between trimesh and BREP for producingthe collision information, shows that data usage is much lower for the representation of geometries withBREPs than trimesh. The results also shows that the accuracy can be significantly higher than fortrimesh as the data usage for trimesh becomes non practical to handle when the required accuracy ishigh. With the high accuracy and with the smooth surfaces used with the BREP the artificial friction isalmost negligible except for cases were intersection points could not be found all around the intersectioncurves due to limitations in the algorithm. |
2014
|
 | Östman, Alexander: Collision detection for trimming curves and BREPs. Department of Computing Science, Umeå University, Sweden, 2014. @mastersthesis{ostman2014collision,
title = {Collision detection for trimming curves and BREPs},
author = {Alexander Östman},
url = {http://umu.diva-portal.org/smash/record.jsf?searchId=2&pid=diva2:718124
http://umu.diva-portal.org/smash/get/diva2:718124/FULLTEXT01.pdf},
year = {2014},
date = {2014-01-01},
school = {Department of Computing Science, Umeå University, Sweden},
abstract = {This report treats the implementation of collision detection algorithms for Boundary representations (BREPs) consisting of connected trimmed surfaces, mainly Non Uniform Rational Basis Spline (NURBS) surfaces. Using the OpenNurbs software package, complicated geometries created in CAD program Space Claim were imported to the physics engine AgX, where dynamic simulations were carried out. Collision detection algorithms for the geometry pairs BREP-line, BREP-plane and BREP-sphere have been developed and investigated. In the case of BREP-sphere collision detection, experiments have been carried out which show that BREP-shape representation exceeds trimesh-shape representation both in computational performance and in collision accuracy. The conclusion is that BREP representation has the potential to replace trimesh representation for some complex geometries with higher computational performance and more accurate simulations as a result.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
This report treats the implementation of collision detection algorithms for Boundary representations (BREPs) consisting of connected trimmed surfaces, mainly Non Uniform Rational Basis Spline (NURBS) surfaces. Using the OpenNurbs software package, complicated geometries created in CAD program Space Claim were imported to the physics engine AgX, where dynamic simulations were carried out. Collision detection algorithms for the geometry pairs BREP-line, BREP-plane and BREP-sphere have been developed and investigated. In the case of BREP-sphere collision detection, experiments have been carried out which show that BREP-shape representation exceeds trimesh-shape representation both in computational performance and in collision accuracy. The conclusion is that BREP representation has the potential to replace trimesh representation for some complex geometries with higher computational performance and more accurate simulations as a result. |
 | Wang, Da; Servin, Martin; Mickelsson, K-O: Outlet design optimization based on large-scale nonsmooth DEM simulation. In: Powder technology, vol. 253, pp. 438–443, 2014. @article{wang2014outlet,
title = {Outlet design optimization based on large-scale nonsmooth DEM simulation},
author = {Da Wang and Martin Servin and K-O Mickelsson},
url = {https://doi.org/10.1016/j.powtec.2013.11.046
http://umu.diva-portal.org/smash/get/diva2:693896/FULLTEXT02.pdf
http://umit.cs.umu.se/modsimcomplmech/docs/papers/outlet.pdf
https://vimeo.com/57324531
http://umit.cs.umu.se/granular/outlet/
},
year = {2014},
date = {2014-01-01},
journal = {Powder technology},
volume = {253},
pages = {438--443},
publisher = {Elsevier},
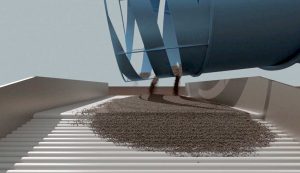
abstract = {We consider the application of a nonsmooth discrete element method to geometric design optimization of a balling drum outlet used in production of iron ore balls. The geometric design optimization problem is based on the need for homogeneous flow of balls from the balling drum onto a wide belt conveyor feeding a roller screen (sieve). An outlet with two design variables is investigated and the optimal shape for the given system and production flow is found by exploring the design space with 2000 simulations.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
We consider the application of a nonsmooth discrete element method to geometric design optimization of a balling drum outlet used in production of iron ore balls. The geometric design optimization problem is based on the need for homogeneous flow of balls from the balling drum onto a wide belt conveyor feeding a roller screen (sieve). An outlet with two design variables is investigated and the optimal shape for the given system and production flow is found by exploring the design space with 2000 simulations. |
 | Lu, Ying; Williams, Jedediyah; Trinkle, Jeff; Lacoursière, Claude: A framework for problem standardization and algorithm comparison in multibody system. In: International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, pp. V006T10A016, American Society of Mechanical Engineers 2014. @inproceedings{lu2014framework,
title = {A framework for problem standardization and algorithm comparison in multibody system},
author = {Ying Lu and Jedediyah Williams and Jeff Trinkle and Claude Lacoursière },
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-129846},
doi = {10.1115/DETC2014-35041},
year = {2014},
date = {2014-01-01},
booktitle = {International Design Engineering Technical Conferences and Computers and Information in Engineering Conference},
volume = {46391},
pages = {V006T10A016},
organization = {American Society of Mechanical Engineers},
abstract = {The underlying dynamic model of multibody systems takes the form. of a differential Complementarity Problem (dCP), which is nonsmooth and thus challenging to integrate. The dCP is typically solved by discretizing it in time, thus converting the simulation problem into the problem of solving a sequence of complementarity problems (CPs). Because the CPs are difficult to solve, many modelling options that affect the dCPs and CPs have been tested, and some reformulation and relaxation options affecting the properties of the CPs and solvers have been studied in the hopes to find the "best" simulation method. One challenge within the existing literature is that there is no standard set of benchmark simulations. In this paper, we propose a framework of Benchmark Problems for Multibody Dynamics (BPMD) to support the fair testing of various simulation algorithms. We designed and constructed a BPMD database and collected an initial set of solution algorithms for testing. The data stored for each simulation problem is sufficient to construct the CPs corresponding to several different simulation design decisions. Once the CPs are constructed from the data, there are several solver options including the PATH solver, nonsmooth Newton methods, fixed-point iteration methods for nonlinear problems, and Lemke's algorithm for linear problems. Additionally, a user-friendly interface is provided to add customized models and solvers. As an example benchmark comparison, we use data from physical planar grasping experiments. Using the input from a physical experiment to drive the simulation, uncertain model parameters such as friction coefficients are determined. This is repeated for different simulation methods and the parameter estimation error serves as a measure of the suitability of each method to predict the observed physical behavior.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
The underlying dynamic model of multibody systems takes the form. of a differential Complementarity Problem (dCP), which is nonsmooth and thus challenging to integrate. The dCP is typically solved by discretizing it in time, thus converting the simulation problem into the problem of solving a sequence of complementarity problems (CPs). Because the CPs are difficult to solve, many modelling options that affect the dCPs and CPs have been tested, and some reformulation and relaxation options affecting the properties of the CPs and solvers have been studied in the hopes to find the "best" simulation method. One challenge within the existing literature is that there is no standard set of benchmark simulations. In this paper, we propose a framework of Benchmark Problems for Multibody Dynamics (BPMD) to support the fair testing of various simulation algorithms. We designed and constructed a BPMD database and collected an initial set of solution algorithms for testing. The data stored for each simulation problem is sufficient to construct the CPs corresponding to several different simulation design decisions. Once the CPs are constructed from the data, there are several solver options including the PATH solver, nonsmooth Newton methods, fixed-point iteration methods for nonlinear problems, and Lemke's algorithm for linear problems. Additionally, a user-friendly interface is provided to add customized models and solvers. As an example benchmark comparison, we use data from physical planar grasping experiments. Using the input from a physical experiment to drive the simulation, uncertain model parameters such as friction coefficients are determined. This is repeated for different simulation methods and the parameter estimation error serves as a measure of the suitability of each method to predict the observed physical behavior. |
 | Lacoursière, Claude; Nordfeldth, Fredrik; Linde, Mattias: A partitioning method for parallelization of large systems in realtime. In: Proceedings of the 3rd Joint International Conference on Multibody System Dynamics and the 7th Asian Conference on Multibody Dynamics, IMSD, 2014. @inproceedings{lacoursiere2014partitioning,
title = {A partitioning method for parallelization of large systems in realtime},
author = {Claude Lacoursière and Fredrik Nordfeldth and Mattias Linde},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/LacoursiereNordfeldthLinde_imsd-acmd2014.pdf},
year = {2014},
date = {2014-01-01},
booktitle = {Proceedings of the 3rd Joint International Conference on Multibody System Dynamics and the 7th Asian Conference on Multibody Dynamics, IMSD},
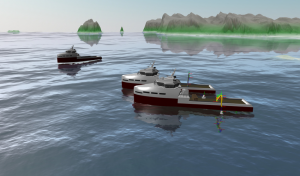
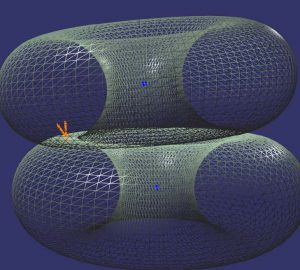
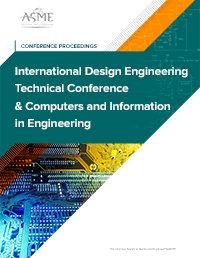
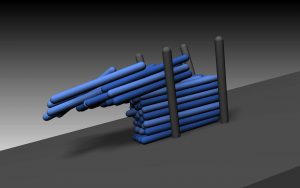
abstract = {We consider real-time simulation of multibody systems in the context of a virtual environment training simulator for sailors manipulating anchoring and tugging cables for stabilizing oil rigs. In such a scenario, there can be several ships mounted with cranes and winches, one oil rig, and several cables modeled with discrete elements [5]. Dry friction is also omnipresent is these systems. The scene used to produce the data in Fig. 1 2 contained a nearly one thousand rigid bodies and elements, as well as three thousand interactions which are either kinematic constraints or very stiff forces. Integrating the Differential Algebraic Equations (DAE)s of motions of such a system requires the solution of sparse linear systems of equations up to ten thousand equations in as many unknowns. In the real-time context of a 3D application running at the standard 60Hz rate, this means a computational budget of roughly 5ms, leaving time for other parts of the application. The only reasonable solution to this is parallelization. This is well understood and active field of research. However, the overhead of current techniques and libraries is such that they are advantageous only for very large systems, and certainly not in the real-time context. This goes both for graph analysis – METIS[2] can take more than 2ms on the problems we consider – and plain factorization [4]. In addition, good load balancing graph analysis with METIS for instance generally produces many fill-ins and offsets benefits of parallelism towards much larger problems. We discuss two aspect of the solution to this problem. The first is a much simplified graph analysis which takes some of the physics into account in the heuristics. The second is a matrix splitting which decouples two subsystems in such a way that strong interactions are taken into account in a stable way, but at the cost of accuracy.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
We consider real-time simulation of multibody systems in the context of a virtual environment training simulator for sailors manipulating anchoring and tugging cables for stabilizing oil rigs. In such a scenario, there can be several ships mounted with cranes and winches, one oil rig, and several cables modeled with discrete elements [5]. Dry friction is also omnipresent is these systems. The scene used to produce the data in Fig. 1 2 contained a nearly one thousand rigid bodies and elements, as well as three thousand interactions which are either kinematic constraints or very stiff forces. Integrating the Differential Algebraic Equations (DAE)s of motions of such a system requires the solution of sparse linear systems of equations up to ten thousand equations in as many unknowns. In the real-time context of a 3D application running at the standard 60Hz rate, this means a computational budget of roughly 5ms, leaving time for other parts of the application. The only reasonable solution to this is parallelization. This is well understood and active field of research. However, the overhead of current techniques and libraries is such that they are advantageous only for very large systems, and certainly not in the real-time context. This goes both for graph analysis – METIS[2] can take more than 2ms on the problems we consider – and plain factorization [4]. In addition, good load balancing graph analysis with METIS for instance generally produces many fill-ins and offsets benefits of parallelism towards much larger problems. We discuss two aspect of the solution to this problem. The first is a much simplified graph analysis which takes some of the physics into account in the heuristics. The second is a matrix splitting which decouples two subsystems in such a way that strong interactions are taken into account in a stable way, but at the cost of accuracy. |
 | Servin, Martin; Wang, Da; Lacoursière, Claude; Bodin, Kenneth: Examining the smooth and nonsmooth discrete element approaches to granular matter. In: International Journal for Numerical Methods in Engineering, vol. 97, no. 12, pp. 878–902, 2014. @article{servin2014examining,
title = {Examining the smooth and nonsmooth discrete element approaches to granular matter},
author = {Martin Servin and Da Wang and Claude Lacoursière and Kenneth Bodin},
url = {http://umit.cs.umu.se/granular/dem/
http://umit.cs.umu.se/modsimcomplmech/docs/papers/nonsmooth_DEM.pdf
https://vimeo.com/58530577},
doi = {10.1002/nme.4612},
year = {2014},
date = {2014-01-01},
journal = {International Journal for Numerical Methods in Engineering},
volume = {97},
number = {12},
pages = {878--902},
abstract = {The smooth and nonsmooth approaches to the discrete element method (DEM) are examined from a computational perspective. The main difference can be understood as using explicit versus implicit time integration. A formula is obtained for estimating the computational effort depending on error tolerance, system geometric shape and size, and on the dynamic state. For the nonsmooth DEM (NDEM), a regularized version mapping to the Hertz contact law is presented. This method has the conventional nonsmooth and smooth DEM as special cases depending on size of time step and value of regularization. The use of the projected Gauss-Seidel solver for NDEM simulation is studied on a range of test systems. The following characteristics are found. First, the smooth DEM is computationally more efficient for soft materials, wide and tall systems, and with increasing flow rate. Secondly, the NDEM is more beneficial for stiff materials, shallow systems, static or slow flow, and with increasing error tolerance. Furthermore, it is found that just as pressure saturates with depth in a granular column, due to force arching, also the required number of iterations saturates and become independent of system size. This effect make the projected Gauss-Seidel solver scale much better than previously thought.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
The smooth and nonsmooth approaches to the discrete element method (DEM) are examined from a computational perspective. The main difference can be understood as using explicit versus implicit time integration. A formula is obtained for estimating the computational effort depending on error tolerance, system geometric shape and size, and on the dynamic state. For the nonsmooth DEM (NDEM), a regularized version mapping to the Hertz contact law is presented. This method has the conventional nonsmooth and smooth DEM as special cases depending on size of time step and value of regularization. The use of the projected Gauss-Seidel solver for NDEM simulation is studied on a range of test systems. The following characteristics are found. First, the smooth DEM is computationally more efficient for soft materials, wide and tall systems, and with increasing flow rate. Secondly, the NDEM is more beneficial for stiff materials, shallow systems, static or slow flow, and with increasing error tolerance. Furthermore, it is found that just as pressure saturates with depth in a granular column, due to force arching, also the required number of iterations saturates and become independent of system size. This effect make the projected Gauss-Seidel solver scale much better than previously thought. |
 | Metrikin, Ivan: A software framework for simulating stationkeeping of a vessel in discontinuous ice. In: Modeling, Identification and Control 2014, pp. 211–248, Norsk Forening for Automatisering, 2014. @inproceedings{metrikin2014software,
title = {A software framework for simulating stationkeeping of a vessel in discontinuous ice},
author = {Ivan Metrikin},
url = {https://ntnuopen.ntnu.no/ntnu-xmlui/bitstream/handle/11250/2392045/MIC-2014-4-2%2b-%2bMetrikin.pdf?sequence=3&isAllowed=y
http://hdl.handle.net/11250/2392045},
doi = {10.4173/mic.2014.4.2},
year = {2014},
date = {2014-01-01},
booktitle = {Modeling, Identification and Control 2014},
volume = {35},
number = {4},
pages = {211--248},
publisher = {Norsk Forening for Automatisering},
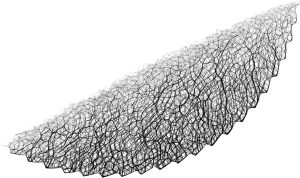
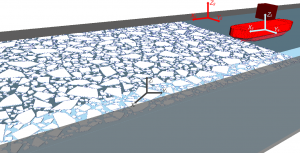
abstract = {This paper describes a numerical package for simulating stationkeeping operations of an offshore vessel in floating sea ice. The software has found broad usage in both academic and industrial projects related to design and operations of floating structures in the Arctic. Interactions with both intact and broken ice conditions can be simulated by the numerical tool, but the main emphasis is placed on modelling managed ice environments relevant for prospective petroleum industry operations in the Arctic. The paper gives a thorough description of the numerical tool from both theoretical and software implementation perspectives. Structural meshing, ice field generation, multibody modelling and ice breaking aspects of the model are presented and discussed. Finally, the main assumptions and limitations of the computational techniques are elucidated and further work directions are suggested.},
keywords = {External},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper describes a numerical package for simulating stationkeeping operations of an offshore vessel in floating sea ice. The software has found broad usage in both academic and industrial projects related to design and operations of floating structures in the Arctic. Interactions with both intact and broken ice conditions can be simulated by the numerical tool, but the main emphasis is placed on modelling managed ice environments relevant for prospective petroleum industry operations in the Arctic. The paper gives a thorough description of the numerical tool from both theoretical and software implementation perspectives. Structural meshing, ice field generation, multibody modelling and ice breaking aspects of the model are presented and discussed. Finally, the main assumptions and limitations of the computational techniques are elucidated and further work directions are suggested. |
 | Sandberg, Sandra Ålstig: Interactive simulation of hydrodynamics for arbitrarily shaped objects. Department of Physics, Umeå University, 2014. @mastersthesis{Sandberg2014,
title = {Interactive simulation of hydrodynamics for arbitrarily shaped objects},
author = {Sandra Ålstig Sandberg},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-90060
http://umu.diva-portal.org/smash/get/diva2:725897/FULLTEXT02.pdf},
year = {2014},
date = {2014-01-01},
school = {Department of Physics, Umeå University},
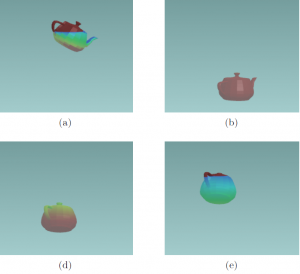
abstract = {Simulating hydrodynamics can require extensive calculations which becomes a problem when doing interactive simulations. This thesis investigates an efficient method for hydrodynamic simulations with the effects of buoyancy, drag, lift and added mass that is implementedand tested with the help of AgX Dynamics using triangulated meshes.
For buoyancy, drag and lift a method of numerical integration over triangles was used to calculate the forces and torques acting on each triangle of a mesh. For added mass a large part of the calculations could be done before the simulation starts using a Boundary Element Method (BEM). The final value for the added mass was calculated each time step based on how the object was submerged.
The method of triangle integration produced results that were close to the analytical values with a certain mesh dependence. The results had an increasing accuracy when the mesh had a more exact representation of the object. The drag and lift coefficients could however be better adjusted. The added mass results also had a mesh dependence, but with accuracy increasing with number of triangles even for shapes that already had an exact representation, e.g. a cube. For a fully submerged sphere with 4900 triangles the maximum error for the added mass was 0.65%.
The time required for precalculations using BEM had a rapid growth with increasing number of triangles due to the factorization of a dense matrix that has a complexity of O(n3). For the hydrodynamic calculations done each time step the time requirement increased linearly with number of triangles.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Simulating hydrodynamics can require extensive calculations which becomes a problem when doing interactive simulations. This thesis investigates an efficient method for hydrodynamic simulations with the effects of buoyancy, drag, lift and added mass that is implementedand tested with the help of AgX Dynamics using triangulated meshes.
For buoyancy, drag and lift a method of numerical integration over triangles was used to calculate the forces and torques acting on each triangle of a mesh. For added mass a large part of the calculations could be done before the simulation starts using a Boundary Element Method (BEM). The final value for the added mass was calculated each time step based on how the object was submerged.
The method of triangle integration produced results that were close to the analytical values with a certain mesh dependence. The results had an increasing accuracy when the mesh had a more exact representation of the object. The drag and lift coefficients could however be better adjusted. The added mass results also had a mesh dependence, but with accuracy increasing with number of triangles even for shapes that already had an exact representation, e.g. a cube. For a fully submerged sphere with 4900 triangles the maximum error for the added mass was 0.65%.
The time required for precalculations using BEM had a rapid growth with increasing number of triangles due to the factorization of a dense matrix that has a complexity of O(n3). For the hydrodynamic calculations done each time step the time requirement increased linearly with number of triangles. |
 | Rönnbäck, Emil: Parallel implementation of the projected Gauss-Seidel method on the Intel Xeon Phi processor – Application to granular matter simulation. Department of Computing Science, Umeå University, Sweden, 2014. @mastersthesis{Ronnbäck2014,
title = {Parallel implementation of the projected Gauss-Seidel method on the Intel Xeon Phi processor – Application to granular matter simulation},
author = {Emil Rönnbäck},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-93299
http://umu.diva-portal.org/smash/get/diva2:747201/FULLTEXT01.pdf},
year = {2014},
date = {2014-01-01},
school = {Department of Computing Science, Umeå University, Sweden},
abstract = {Being able to simulate granular matter is important, because they are ubiquitous both in nature and in industry. Some examples of granular materials are ore, sand, coffee, rice, corn, and snow. Research and development of new, more accurate, and faster methods to simulate even more complex materials with millions of particles are needed. In the work of this thesis a typical scene containing thousands of particles has been used for analysing simulation performance using the iterative Gauss-Seidel method adapted to the specifications and capabilities of the Intel Xeon Phi coprocessor. The work began with analysing the performance (wall-clock time and speedup) of a method developed by Algoryx Simulation. The work continued with finding the parts in the code causing bottlenecks and implementing improvements such as a distributed task scheduler and vectorization of operations. In the end, this resulted in shorter execution time and linear speedup using more than 40 threads, compared to 20 in the initial state. We also investigated the benefit of other techniques, such as cache prefetching and usage of huge page sizes, but found no performance gain from these. It is well known that the Xeon Phi coprocessor performs well when executing highly parallel applications, but overload may occur if excessive amount of data is requested by many threads simultaneously. To tackle this issue, the convergence rate of the Gauss-Seidel method during simulation has been measured and suggested modifications of the method decreasing data flow have been implemented and analysed.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Being able to simulate granular matter is important, because they are ubiquitous both in nature and in industry. Some examples of granular materials are ore, sand, coffee, rice, corn, and snow. Research and development of new, more accurate, and faster methods to simulate even more complex materials with millions of particles are needed. In the work of this thesis a typical scene containing thousands of particles has been used for analysing simulation performance using the iterative Gauss-Seidel method adapted to the specifications and capabilities of the Intel Xeon Phi coprocessor. The work began with analysing the performance (wall-clock time and speedup) of a method developed by Algoryx Simulation. The work continued with finding the parts in the code causing bottlenecks and implementing improvements such as a distributed task scheduler and vectorization of operations. In the end, this resulted in shorter execution time and linear speedup using more than 40 threads, compared to 20 in the initial state. We also investigated the benefit of other techniques, such as cache prefetching and usage of huge page sizes, but found no performance gain from these. It is well known that the Xeon Phi coprocessor performs well when executing highly parallel applications, but overload may occur if excessive amount of data is requested by many threads simultaneously. To tackle this issue, the convergence rate of the Gauss-Seidel method during simulation has been measured and suggested modifications of the method decreasing data flow have been implemented and analysed. |
 | Sundberg, Johan: Parallel projected Gauss-Seidelsolver for large-scale granular matter: Examining the physics of the parallel solver and development of a multigrid solver. Department of Physics, Umeå University, 2014. @mastersthesis{Sundberg2014,
title = {Parallel projected Gauss-Seidelsolver for large-scale granular matter: Examining the physics of the parallel solver and development of a multigrid solver},
author = {Johan Sundberg},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-85831
http://www.diva-portal.org/smash/get/diva2:695410/FULLTEXT01.pdf
},
year = {2014},
date = {2014-01-01},
school = {Department of Physics, Umeå University},
abstract = {Granular matter is found everywhere in nature and some examples include sand, rice,coee beans and iron ore pellets. Many dierent methods exists for simulating granularmatters using computers. In the scope of this thesis a physics engine called AgX Dynamicsfrom Algoryx Simulation AB is used to investigate and further develop methodsinvolving the discrete element method. During the rst half of 2013 a parallel solverfor the projected Gauss-Seidel method was implemented in AgX in order to speed upthe simulation time of simulations involving granular materials. In this thesis projectit is shown that the behaviour of the physics of this parallel solver is identical to theserial solver. Secondly this thesis works on the development of a multigrid solver forthe Gauss-Seidel method. Multigrid in this context means that the particle systemis partitioned in space. Each partition is then merged into a rigid body and contactforces between these rigid bodies is solved to machine precision using a direct solver.The forces from this direct solve is then used when solving the internal part of thepartitions using an iterative projected Gauss-Seidel method. The motivation for developinga multigrid method is to achieve faster convergence and even more speed-upof the solver. Numerical experiments has been performed on a 1D column and a 3Dsilo. The results show high potential of the method and the one-dimensional columnbehaves closer to a direct solver than an iterative solver. The thesis was done for UMIT Research Lab, Umea University and Algoryx Simulation AB.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Granular matter is found everywhere in nature and some examples include sand, rice,coee beans and iron ore pellets. Many dierent methods exists for simulating granularmatters using computers. In the scope of this thesis a physics engine called AgX Dynamicsfrom Algoryx Simulation AB is used to investigate and further develop methodsinvolving the discrete element method. During the rst half of 2013 a parallel solverfor the projected Gauss-Seidel method was implemented in AgX in order to speed upthe simulation time of simulations involving granular materials. In this thesis projectit is shown that the behaviour of the physics of this parallel solver is identical to theserial solver. Secondly this thesis works on the development of a multigrid solver forthe Gauss-Seidel method. Multigrid in this context means that the particle systemis partitioned in space. Each partition is then merged into a rigid body and contactforces between these rigid bodies is solved to machine precision using a direct solver.The forces from this direct solve is then used when solving the internal part of thepartitions using an iterative projected Gauss-Seidel method. The motivation for developinga multigrid method is to achieve faster convergence and even more speed-upof the solver. Numerical experiments has been performed on a 1D column and a 3Dsilo. The results show high potential of the method and the one-dimensional columnbehaves closer to a direct solver than an iterative solver. The thesis was done for UMIT Research Lab, Umea University and Algoryx Simulation AB. |
 | Lindberg, Lars: Remote rendering of physics simulations and scalability aspects in web applications. Department of Computing Science, Umeå University, Sweden, 2014. @mastersthesis{Lindberg2014,
title = {Remote rendering of physics simulations and scalability aspects in web applications},
author = {Lars Lindberg},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-90042
https://umu.diva-portal.org/smash/get/diva2:725806/FULLTEXT01.pdf},
year = {2014},
date = {2014-01-01},
school = {Department of Computing Science, Umeå University, Sweden},
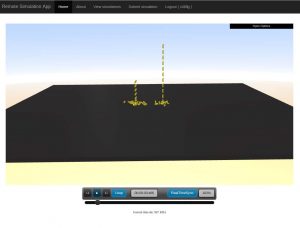
abstract = {This thesis, assigned by Algoryx Simulation AB, explores the concept of implementing a web application for managing Algoryx based physics simulations. The application enables users to get access to the Algoryx simulation software by providing a user interface for clients to submit scenes files to be simulated, and to view a 3D visualization of the finished simulations rendered directly in the web browser. This allows clients to do away with the work of performing the compute intensive physic simulations locally and instead hand over that responsibility to the web service, while the client only needs to handle the actual rendering. Applications made available through a web browser allows users to get easy access to applications that does not require any installation procedures. For that reason the clients do not need any simulation software or any plugin installed to access the service. This makes it easy to share results of simulations to customers by just giving out a link that can be accessed through a browser.
This paper also includes a theoretical study on scalability in web applications. The theory explains different ways of scaling, and common techniques and methods used to help achieving scalability that can be useful when designing and building scalable web system.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
This thesis, assigned by Algoryx Simulation AB, explores the concept of implementing a web application for managing Algoryx based physics simulations. The application enables users to get access to the Algoryx simulation software by providing a user interface for clients to submit scenes files to be simulated, and to view a 3D visualization of the finished simulations rendered directly in the web browser. This allows clients to do away with the work of performing the compute intensive physic simulations locally and instead hand over that responsibility to the web service, while the client only needs to handle the actual rendering. Applications made available through a web browser allows users to get easy access to applications that does not require any installation procedures. For that reason the clients do not need any simulation software or any plugin installed to access the service. This makes it easy to share results of simulations to customers by just giving out a link that can be accessed through a browser.
This paper also includes a theoretical study on scalability in web applications. The theory explains different ways of scaling, and common techniques and methods used to help achieving scalability that can be useful when designing and building scalable web system. |
2013
|
| Häggström, Martin: Collision detection with NURBS. Department of Computing Science, Umeå University, Sweden, 2013. @mastersthesis{Häggström2013,
title = {Collision detection with NURBS},
author = {Martin Häggström},
year = {2013},
date = {2013-02-26},
school = {Department of Computing Science, Umeå University, Sweden},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
|
 | Wang, Da; Servin, Martin; Mickelsson, Kjell-Ove: Applying nonsmooth DEM in geometric design optimization of a balling drum outlet. In: 2013. @article{wangapplying,
title = {Applying nonsmooth DEM in geometric design optimization of a balling drum outlet},
author = {Da Wang and Martin Servin and Kjell-Ove Mickelsson},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/outlet_abstract.pdf},
year = {2013},
date = {2013-01-01},
abstract = {We consider the application of a nonsmooth discrete element method (NDEM) [1-3] to geometric design optimization of a balling drum outlet used in production of iron ore pellets. The geometric design optimization problem is based on the need for spatially and temporally homogeneous flow of pellets from the balling drum onto a wide belt conveyor feeding a roller sieve. Homogeneous pellet flow makes sieving most efficient and facilitates good control in the hardening furnace. The model of the pellet material and balling drum are specified in a NDEM framework. The simulation and analysis procedure is described. A material flow profile in terms of design parameters is computed from simulation data and used for solving the design optimization problem. The solution is compared with different designs used in a real production plants. It is demonstrated that the method can clearly distinguish between the original and improved design in that plant. The uncertainty in the optimal design parameters is discussed and put in relation to the assumptions and approximations behind the particular NDEM that is used. Proposal for how to improve and validate the material and balling drum model is given.
The particular NDEM is described in more detail in an accompanying paper [4] where the method is also contrasted to the more conventional smooth discrete element method (DEM) [5]. The nonsmooth approach allows for time integration using time-steps much larger than the characteristic elastic response time. Given an efficient solver and that the system and application justifies the nonsmooth approximation a considerable speed-up can be achieved, though it should be recognized that this is significantly problem dependent. The current paper includes analysis of the computational efficiency of the NDEM approach to the particular case of balling drum outlet flow analysis with a given error tolerance. Time estimates of a corresponding smooth DEM approach is provided for comparison. },
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
We consider the application of a nonsmooth discrete element method (NDEM) [1-3] to geometric design optimization of a balling drum outlet used in production of iron ore pellets. The geometric design optimization problem is based on the need for spatially and temporally homogeneous flow of pellets from the balling drum onto a wide belt conveyor feeding a roller sieve. Homogeneous pellet flow makes sieving most efficient and facilitates good control in the hardening furnace. The model of the pellet material and balling drum are specified in a NDEM framework. The simulation and analysis procedure is described. A material flow profile in terms of design parameters is computed from simulation data and used for solving the design optimization problem. The solution is compared with different designs used in a real production plants. It is demonstrated that the method can clearly distinguish between the original and improved design in that plant. The uncertainty in the optimal design parameters is discussed and put in relation to the assumptions and approximations behind the particular NDEM that is used. Proposal for how to improve and validate the material and balling drum model is given.
The particular NDEM is described in more detail in an accompanying paper [4] where the method is also contrasted to the more conventional smooth discrete element method (DEM) [5]. The nonsmooth approach allows for time integration using time-steps much larger than the characteristic elastic response time. Given an efficient solver and that the system and application justifies the nonsmooth approximation a considerable speed-up can be achieved, though it should be recognized that this is significantly problem dependent. The current paper includes analysis of the computational efficiency of the NDEM approach to the particular case of balling drum outlet flow analysis with a given error tolerance. Time estimates of a corresponding smooth DEM approach is provided for comparison. |
 | Wang, Da; Servin, Martin: Validation of a nonsmooth discrete element method by confined compression and rod penetration. In: 2013. @inproceedings{Wang2013ValidationOA,
title = {Validation of a nonsmooth discrete element method by confined compression and rod penetration},
author = {Da Wang and Martin Servin},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/compression_NDEM.pdf},
year = {2013},
date = {2013-01-01},
abstract = {The nonsmooth discrete element method (NDEM) [1-2] is an alternative to the conventional smooth discrete element method (DEM). In the nonsmooth approach the contacts are modelled using constraints and impulses, which allows for velocity discontinuities and instantaneous force propagation throughout the system and thus making large time-step integration possible. The method may result in fast simulations, including realtime simulators with heavy machinery [3] and largescale granular matter flow simulation for exploring the design space of balling drum outlets [4] used in mineral ore pelletization. We present results for the validation experiements described in Ref. [5] and [6] of bulk behaviour under confined compression and rod penetration. We use the NDEM regularized with the nonlinear Hertz contact law, referred to as semismooth DEM in Ref. [1], that allows modeling of the microscopic properties particle elasticity, restitution coefficient, contact friction and rolling friction. The simulation results are compared to measurements from experiments and DEM simulation provided in [5] and [6]. The dependency on NDEM solver choice and parameters, such as size of time-step and number of iterations, are investigated.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
The nonsmooth discrete element method (NDEM) [1-2] is an alternative to the conventional smooth discrete element method (DEM). In the nonsmooth approach the contacts are modelled using constraints and impulses, which allows for velocity discontinuities and instantaneous force propagation throughout the system and thus making large time-step integration possible. The method may result in fast simulations, including realtime simulators with heavy machinery [3] and largescale granular matter flow simulation for exploring the design space of balling drum outlets [4] used in mineral ore pelletization. We present results for the validation experiements described in Ref. [5] and [6] of bulk behaviour under confined compression and rod penetration. We use the NDEM regularized with the nonlinear Hertz contact law, referred to as semismooth DEM in Ref. [1], that allows modeling of the microscopic properties particle elasticity, restitution coefficient, contact friction and rolling friction. The simulation results are compared to measurements from experiments and DEM simulation provided in [5] and [6]. The dependency on NDEM solver choice and parameters, such as size of time-step and number of iterations, are investigated. |
 | Lacoursière, Claude; Lu, Ying; Williams, Jedediyah; Trinkle, Jeff: Standard interface for data analysis of solvers in multibody dynamics. In: Canadian Conference on Nonlinear Solid Mechanics (CanCNSM)(July 2013), 2013. @inproceedings{lacoursiere2013standard,
title = {Standard interface for data analysis of solvers in multibody dynamics},
author = {Claude Lacoursière and Ying Lu and Jedediyah Williams and Jeff Trinkle},
url = {https://foswiki.cs.rpi.edu/foswiki/pub/RoboticsWeb/LabPublications/Standard_interface.pdf},
year = {2013},
date = {2013-01-01},
booktitle = {Canadian Conference on Nonlinear Solid Mechanics (CanCNSM)(July 2013)},
volume = {8},
abstract = {After more than twenty years spent on the development of simulation models and integration algorithms, there is no convenient way to compare the performance of the many algorithms that solve the Complementarity Problem (CP) in an unbiased manner. The constraint models in multibody systems naturally take the form of CPs and the current methods for the formulations lead to singular CPs which are difficult to solve. Since the underlying models are nonsmooth and nonlinear, mathematical theory supporting the design of simulation methods is sparse. For these reasons, we find that an important tool in the field of physical simulation will be a benchmark database that facilitates the fair comparison of solver algorithms. In any field where theory is limited, sound empirical methods must be used to measure progress and set future research directions. We present an HDF5 database, which provides a standard interface for the capture of data needed to reconstruct the time-stepping subproblem from any open-source physics engine e.g. Bullet, ODE, Gazebo, ChronoEngine etc. Timing data, as well as unilateral and bilateral constraint information is collected at the time-step level. This dataset may then be accessed later to reformulate the subproblem using different dynamics models. Applying different solvers to the CPs provides a comparison of solver performance and error analysis. This standard software interface provides a convenient and fair way to compare the solvers in the different physics engines as well as customized algorithms for multibody systems.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
After more than twenty years spent on the development of simulation models and integration algorithms, there is no convenient way to compare the performance of the many algorithms that solve the Complementarity Problem (CP) in an unbiased manner. The constraint models in multibody systems naturally take the form of CPs and the current methods for the formulations lead to singular CPs which are difficult to solve. Since the underlying models are nonsmooth and nonlinear, mathematical theory supporting the design of simulation methods is sparse. For these reasons, we find that an important tool in the field of physical simulation will be a benchmark database that facilitates the fair comparison of solver algorithms. In any field where theory is limited, sound empirical methods must be used to measure progress and set future research directions. We present an HDF5 database, which provides a standard interface for the capture of data needed to reconstruct the time-stepping subproblem from any open-source physics engine e.g. Bullet, ODE, Gazebo, ChronoEngine etc. Timing data, as well as unilateral and bilateral constraint information is collected at the time-step level. This dataset may then be accessed later to reformulate the subproblem using different dynamics models. Applying different solvers to the CPs provides a comparison of solver performance and error analysis. This standard software interface provides a convenient and fair way to compare the solvers in the different physics engines as well as customized algorithms for multibody systems. |
 | Carlquist, Joel: Evaluation of Teaching Evolution Using Evolutionary Algorithms in a 2D Physics Sandbox. Department of Computing Science, Umeå University, Sweden, 2013. @mastersthesis{Carlquist2013,
title = {Evaluation of Teaching Evolution Using Evolutionary Algorithms in a 2D Physics Sandbox},
author = {Joel Carlquist},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-80639
https://www.diva-portal.org/smash/get/diva2:650569/FULLTEXT01.pdf
},
year = {2013},
date = {2013-01-01},
school = {Department of Computing Science, Umeå University, Sweden},
abstract = {Evolution and Darwin’s theory is the most important scientific theories for understanding human genealogy and our heritage. However, the theory of evolution has been continuously challenged and denied, without conclusive evidence against it. To show both the possibilities and power of evolution we are able to use evolutionary algorithms, a method used in computing science that is inspired by evolution. This is shown possible by developing and analysing a tool created for the 2D physics sandbox Algodoo. The tool uses evolutionary algorithms for improving objects. This tool is evaluated in two parts, a user survey and an analysis of the results of the evolution, where both indicate that while the tool does not quite reach the goals set, with further development the requirements will be met. The thesis also contains an overview of evolutionary algorithms and methods used in these, especially the methods used by Karl Sims in his work on evolved creatures. His work has been a great inspiration to this thesis.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Evolution and Darwin’s theory is the most important scientific theories for understanding human genealogy and our heritage. However, the theory of evolution has been continuously challenged and denied, without conclusive evidence against it. To show both the possibilities and power of evolution we are able to use evolutionary algorithms, a method used in computing science that is inspired by evolution. This is shown possible by developing and analysing a tool created for the 2D physics sandbox Algodoo. The tool uses evolutionary algorithms for improving objects. This tool is evaluated in two parts, a user survey and an analysis of the results of the evolution, where both indicate that while the tool does not quite reach the goals set, with further development the requirements will be met. The thesis also contains an overview of evolutionary algorithms and methods used in these, especially the methods used by Karl Sims in his work on evolved creatures. His work has been a great inspiration to this thesis. |
2012
|
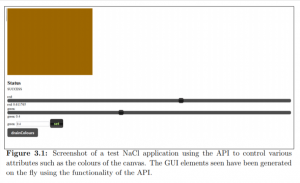 | Widlund, Tobias: Application Programming Interface for Native Web Applications. Department of Computer Science, Electrical and Space Engineering, Luleå University of Technology , 2012. @mastersthesis{widlund_application2012,
title = {Application Programming Interface for Native Web Applications},
author = {Tobias Widlund},
url = {http://ltu.diva-portal.org/smash/record.jsf?pid=diva2%3A1020022&dswid=-73
http://ltu.diva-portal.org/smash/get/diva2:1020022/FULLTEXT02.pdf
},
year = {2012},
date = {2012-06-21},
school = {Department of Computer Science, Electrical and Space Engineering, Luleå University of Technology },
abstract = {This report describes a project about designing and implementing a usable application programming interface [API] for an existing application that was being ported to a web platform.
Today we experience a shift in how we humans work with computers in the sense that everything becomes more and more web oriented. To stay usable, software has to adapt to this and this project is an example on how such adaption may be performed.
The application, called Algodoo is an interactive 2D physics simulator written in C++ and as this was ported to the web using Native Client [NaCl] , it required new functionality to allow web page elements to interact with it. In other words, an API. It is the design and implementation of this API that is the focus of this report, but within it, the background for the project, will also be explained.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
This report describes a project about designing and implementing a usable application programming interface [API] for an existing application that was being ported to a web platform.
Today we experience a shift in how we humans work with computers in the sense that everything becomes more and more web oriented. To stay usable, software has to adapt to this and this project is an example on how such adaption may be performed.
The application, called Algodoo is an interactive 2D physics simulator written in C++ and as this was ported to the web using Native Client [NaCl] , it required new functionality to allow web page elements to interact with it. In other words, an API. It is the design and implementation of this API that is the focus of this report, but within it, the background for the project, will also be explained. |
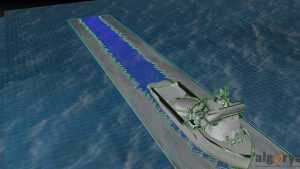 | Berglund, Tomas: Ice fracture model for real-time shipsimulator. Department of Physics, Umeå University, 2012. @mastersthesis{berglund2012ice,
title = {Ice fracture model for real-time shipsimulator},
author = {Tomas Berglund},
url = {http://umu.diva-portal.org/smash/record.jsf?searchId=7&pid=diva2:586946
https://www.youtube.com/watch?v=-RCzkgP1cDw&ab_channel=Algoryx
http://umu.diva-portal.org/smash/get/diva2:586946/FULLTEXT01.pdf},
year = {2012},
date = {2012-01-01},
school = {Department of Physics, Umeå University},
abstract = {Navigating in the arctic has become more common, but it is dificult and dangerous due to the presence of ice. Any training under safer circumstances is therefore very valuable, enter the need for ship simulators. Ship simulators today incorporate many features, such as cranes, anchors, wires, and state of the art physics. However, the inclusion of ice is very rare due to the complexity of simulating the feedback from the ice breaking progress.The purpose of this project is to build a model and numerical methods to simulate icefracture in real-time, which is to be used in ship simulators. The model presented inthis project is implemented with the use of the physics engine AgX Dynamics made by Algoryx Simulation AB. The method represents the ice sheet as a non-homogeneous mesh. A collision with thehull of the ship injects deformation energy into the ice. The energy from the inelasticimpact is distributed on the ice sheet according to a quasi-static crack propagationmodel that is dened on a static mesh. The cracks are guided using stress elds thatapproximate the strain in each vertex. The distribution of the strain is done by a simple model which allows for breaking ice in non-uniform fragments. This is more realistic than fracture in predened shapes which is the main contribution of this project. The fragments become unbreakable rigid body ice oes that interact with the ship’s hull by collision and friction. The implementation of the ice model is tested by using a trimesh model of the TorViking II icebreaker using approximated buoyancy calculations, damping equations, and engine forces. Real-time performance is not achieved yet in the general case, but this is due to the choice of collision geometry and the oe creation. Unstable force spikes from the contacts between the ship and the ice is detected, but the overall global ice resistance shows few abnormalities. Replacing the collision geometry and the rigid body oes isnecessary for the implementation to be able to run in real-time. Further experiments to compare with real model data is needed to be able to validate the model.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Navigating in the arctic has become more common, but it is dificult and dangerous due to the presence of ice. Any training under safer circumstances is therefore very valuable, enter the need for ship simulators. Ship simulators today incorporate many features, such as cranes, anchors, wires, and state of the art physics. However, the inclusion of ice is very rare due to the complexity of simulating the feedback from the ice breaking progress.The purpose of this project is to build a model and numerical methods to simulate icefracture in real-time, which is to be used in ship simulators. The model presented inthis project is implemented with the use of the physics engine AgX Dynamics made by Algoryx Simulation AB. The method represents the ice sheet as a non-homogeneous mesh. A collision with thehull of the ship injects deformation energy into the ice. The energy from the inelasticimpact is distributed on the ice sheet according to a quasi-static crack propagationmodel that is dened on a static mesh. The cracks are guided using stress elds thatapproximate the strain in each vertex. The distribution of the strain is done by a simple model which allows for breaking ice in non-uniform fragments. This is more realistic than fracture in predened shapes which is the main contribution of this project. The fragments become unbreakable rigid body ice oes that interact with the ship’s hull by collision and friction. The implementation of the ice model is tested by using a trimesh model of the TorViking II icebreaker using approximated buoyancy calculations, damping equations, and engine forces. Real-time performance is not achieved yet in the general case, but this is due to the choice of collision geometry and the oe creation. Unstable force spikes from the contacts between the ship and the ice is detected, but the overall global ice resistance shows few abnormalities. Replacing the collision geometry and the rigid body oes isnecessary for the implementation to be able to run in real-time. Further experiments to compare with real model data is needed to be able to validate the model. |
 | Backman, Anders; Bodin, Kenneth; Lacoursière, Claude; Servin, Martin: Democratizing CAE with Interactive Multiphysics Simulation and Simulators. In: NAFEMS NORDIC Conference: Engineering Simulation: Best Practices, New Developments, Future Trends, 22-23 May 2012, Gothenburg, Sweden, 2012. @inproceedings{backman2012democratizing,
title = {Democratizing CAE with Interactive Multiphysics Simulation and Simulators},
author = {Anders Backman and Kenneth Bodin and Claude Lacoursière and Martin Servin},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-55935},
year = {2012},
date = {2012-01-01},
booktitle = {NAFEMS NORDIC Conference: Engineering Simulation: Best Practices, New Developments, Future Trends, 22-23 May 2012, Gothenburg, Sweden},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
|
| Metrikin, Ivan; Lu, Wenjun; Lubbad, Raed; Løset, Sveinung; Kashafutdinov, Marat: Numerical Simulation of a Floater in a Broken-Ice Field: Part I—Model Description. In: International Conference on Offshore Mechanics and Arctic Engineering, pp. 579–588, American Society of Mechanical Engineers 2012. @inproceedings{metrikin2012numerical,
title = {Numerical Simulation of a Floater in a Broken-Ice Field: Part I—Model Description},
author = {Ivan Metrikin and Wenjun Lu and Raed Lubbad and Sveinung Løset and Marat Kashafutdinov},
doi = {10.1115/OMAE2012-83938},
year = {2012},
date = {2012-01-01},
booktitle = {International Conference on Offshore Mechanics and Arctic Engineering},
volume = {44939},
pages = {579--588},
organization = {American Society of Mechanical Engineers},
abstract = {This paper presents a novel concept for simulating the ice-floater interaction process. The concept is based on a mathematical model which emphasizes the station-keeping scenario, i.e. when the relative velocity between the floater and the ice is comparatively small. This means that the model is geared towards such applications as dynamic positioning in ice and ice management.
The concept is based on coupling the rigid multibody simulations with the Finite Element Method (FEM) simulations. The rigid multibody simulation is implemented through a physics engine which is used to model the dynamic behaviour of rigid bodies which undergo large translational and rotational displacements (the floater and the ice floes). The FEM is used to simulate the material behaviour of the ice and the fluid, i.e. the ice breaking and the hydrodynamics of the ice floes. Within this framework, the physics engine is responsible for dynamically detecting the contacts between the objects in the calculation domain, and the FEM software is responsible for calculating the contact forces. The concept is applicable for simulations in a three-dimensional space (3D).
The model described in this paper is divided into two main parts: the mathematical ice model and the mathematical floater model. The mathematical ice model allows modelling both intact level ice and discontinuous ice within a single framework. However, the primary focus of this paper is placed on modelling the broken ice conditions. A floater is modelled as a rigid body with 6 degrees of freedom, i.e. no deformations of the floater’s hull are allowed. Nevertheless, the hydrodynamics of the floater and the ice is considered within the outlined model.
The presented approach allows implementing realistic, high fidelity 3D simulations of the ice-fluid-structure interaction process.},
keywords = {External},
pubstate = {published},
tppubtype = {inproceedings}
}
This paper presents a novel concept for simulating the ice-floater interaction process. The concept is based on a mathematical model which emphasizes the station-keeping scenario, i.e. when the relative velocity between the floater and the ice is comparatively small. This means that the model is geared towards such applications as dynamic positioning in ice and ice management.
The concept is based on coupling the rigid multibody simulations with the Finite Element Method (FEM) simulations. The rigid multibody simulation is implemented through a physics engine which is used to model the dynamic behaviour of rigid bodies which undergo large translational and rotational displacements (the floater and the ice floes). The FEM is used to simulate the material behaviour of the ice and the fluid, i.e. the ice breaking and the hydrodynamics of the ice floes. Within this framework, the physics engine is responsible for dynamically detecting the contacts between the objects in the calculation domain, and the FEM software is responsible for calculating the contact forces. The concept is applicable for simulations in a three-dimensional space (3D).
The model described in this paper is divided into two main parts: the mathematical ice model and the mathematical floater model. The mathematical ice model allows modelling both intact level ice and discontinuous ice within a single framework. However, the primary focus of this paper is placed on modelling the broken ice conditions. A floater is modelled as a rigid body with 6 degrees of freedom, i.e. no deformations of the floater’s hull are allowed. Nevertheless, the hydrodynamics of the floater and the ice is considered within the outlined model.
The presented approach allows implementing realistic, high fidelity 3D simulations of the ice-fluid-structure interaction process. |
| Metrikin, Ivan; Borzov, Andrey; Lubbad, Raed; Løset, Sveinung: Numerical simulation of a floater in a broken-ice field: Part II—Comparative study of physics engines. In: International Conference on Offshore Mechanics and Arctic Engineering, pp. 477–486, American Society of Mechanical Engineers 2012. @inproceedings{metrikin2012numericalb,
title = {Numerical simulation of a floater in a broken-ice field: Part II—Comparative study of physics engines},
author = {Ivan Metrikin and Andrey Borzov and Raed Lubbad and Sveinung Løset},
doi = {10.1115/OMAE2012-83430},
year = {2012},
date = {2012-01-01},
booktitle = {International Conference on Offshore Mechanics and Arctic Engineering},
volume = {44939},
pages = {477--486},
organization = {American Society of Mechanical Engineers},
abstract = {Numerical simulation of a floater in ice-infested waters can be performed using a physics engine. This software can dynamically detect contacts and calculate the contact forces in a three-dimensional space among various irregularly shaped bodies, e.g. the floater and the ice floes. Previously, various physics engines were successfully applied to simulate floaters in ice. However, limited attention was paid to the criteria for selecting a particular engine for the simulation of a floater in broken-ice conditions.
In this paper, four publicly available physics engines (AgX Multiphysics, Open Dynamics Engine, PhysX and Vortex) are compared in terms of integration performance and contact detection accuracy. These two aspects are assumed to be the most important for simulating a floater in broken ice. Furthermore, the access to code, documentation quality and the level of technical support are evaluated and discussed. The main conclusion is that each physics engine has its own strength and weaknesses and none of the engines is perfect. These strength and weaknesses are revealed and discussed in the paper.},
keywords = {External},
pubstate = {published},
tppubtype = {inproceedings}
}
Numerical simulation of a floater in ice-infested waters can be performed using a physics engine. This software can dynamically detect contacts and calculate the contact forces in a three-dimensional space among various irregularly shaped bodies, e.g. the floater and the ice floes. Previously, various physics engines were successfully applied to simulate floaters in ice. However, limited attention was paid to the criteria for selecting a particular engine for the simulation of a floater in broken-ice conditions.
In this paper, four publicly available physics engines (AgX Multiphysics, Open Dynamics Engine, PhysX and Vortex) are compared in terms of integration performance and contact detection accuracy. These two aspects are assumed to be the most important for simulating a floater in broken ice. Furthermore, the access to code, documentation quality and the level of technical support are evaluated and discussed. The main conclusion is that each physics engine has its own strength and weaknesses and none of the engines is perfect. These strength and weaknesses are revealed and discussed in the paper. |
 | Eriksson, Benjamin: Migrating Real-time Applications to the Web Browser. Department of Computing Science, Umeå University, Sweden, 2012. @mastersthesis{Eriksson2012,
title = {Migrating Real-time Applications to the Web Browser},
author = {Benjamin Eriksson},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-80304
https://www.diva-portal.org/smash/get/diva2:648491/FULLTEXT01.pdf},
year = {2012},
date = {2012-01-01},
school = {Department of Computing Science, Umeå University, Sweden},
abstract = {Today the web browser get a more central role in the arsenal of programs users use and at the same time installing programs is a bit of the past and every type of applications gets a web alternative. Users sees this as a good thing, however software companies which have put a lot of time, effort and money into their products might not be as happy in this platform paradigm shift.
The question is though, does it need to be a paradigm shift? Or is it possible to move an old application into this new, Operating System (OS) and architecture agnostic, multi purpose system the web has developed into?
This thesis tries to summarize which techniques there are, how they work, what their strengths and weaknesses are. As a bonus it also contains an independent case study of how it is to use the technology Native Client (NaCl) in alarge scale project.
The conclusion, from the case study, is that NaCl is a very promising technology both for migrating old code and for creating high performance code for this new platform. Our tests shows a 12:9% speed up when we using the 64 bitNaCl version over the native x86 32 bit version of Algodoo.
However, even though the technology seems mature the Software Development Kit (SDK) aren't which might be reason enough to idle for a while.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Today the web browser get a more central role in the arsenal of programs users use and at the same time installing programs is a bit of the past and every type of applications gets a web alternative. Users sees this as a good thing, however software companies which have put a lot of time, effort and money into their products might not be as happy in this platform paradigm shift.
The question is though, does it need to be a paradigm shift? Or is it possible to move an old application into this new, Operating System (OS) and architecture agnostic, multi purpose system the web has developed into?
This thesis tries to summarize which techniques there are, how they work, what their strengths and weaknesses are. As a bonus it also contains an independent case study of how it is to use the technology Native Client (NaCl) in alarge scale project.
The conclusion, from the case study, is that NaCl is a very promising technology both for migrating old code and for creating high performance code for this new platform. Our tests shows a 12:9% speed up when we using the 64 bitNaCl version over the native x86 32 bit version of Algodoo.
However, even though the technology seems mature the Software Development Kit (SDK) aren't which might be reason enough to idle for a while. |
2011
|
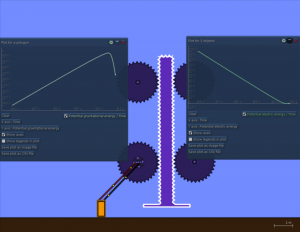 | Dahlberg, Emanuel: Electricity in a 2D mechanics simulator for education. Department of Computing Science, Umeå University, Sweden, 2011. @mastersthesis{dahlberg2011electricity,
title = {Electricity in a 2D mechanics simulator for education},
author = {Emanuel Dahlberg},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-40615
http://umu.diva-portal.org/smash/get/diva2:401366/FULLTEXT01.pdf},
year = {2011},
date = {2011-01-01},
school = {Department of Computing Science, Umeå University, Sweden},
abstract = {Electricity can be a difficult topic to grasp since it is abstract, it is e.g. not possible to see the current and the voltage in a circuit. If electricity can be simulated and visualized, it can become less abstract and easier to understand. This thesis covers the process of simulating electricity in real-time together with a mechanics simulator, called Algodoo.
The process of analyzing electric circuits from a computers point of view is covered as well as different ways of simulating electric motors, generators and lasers. A large part of the thesis covers how to integrate the electricity and the mechanics simulators in a stable and accurate way. Furthermore, making the objects of the mechanics simulator able to conduct electricity is also covered.
The thesis shows that it is possible to simulate electricity in real-time, and that physically correct conducting objects requires a lot of processing power, but can be simplified without losing too much correctness. The thesis also shows that the electrical and mechanics simulators preferably should be solved together to get a stable simulation.
Simulating electricity opens up an endless number of interactive scenarios, e.g. mechanical switches, potentiometers, relays and even logic gates. It can be a helpful aid as an introduction to electronics and since the simulators are integrated, it can also provide an introduction to mechanical work. The amount of energy required to perform dierent tasks can be compared and analyzed.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Electricity can be a difficult topic to grasp since it is abstract, it is e.g. not possible to see the current and the voltage in a circuit. If electricity can be simulated and visualized, it can become less abstract and easier to understand. This thesis covers the process of simulating electricity in real-time together with a mechanics simulator, called Algodoo.
The process of analyzing electric circuits from a computers point of view is covered as well as different ways of simulating electric motors, generators and lasers. A large part of the thesis covers how to integrate the electricity and the mechanics simulators in a stable and accurate way. Furthermore, making the objects of the mechanics simulator able to conduct electricity is also covered.
The thesis shows that it is possible to simulate electricity in real-time, and that physically correct conducting objects requires a lot of processing power, but can be simplified without losing too much correctness. The thesis also shows that the electrical and mechanics simulators preferably should be solved together to get a stable simulation.
Simulating electricity opens up an endless number of interactive scenarios, e.g. mechanical switches, potentiometers, relays and even logic gates. It can be a helpful aid as an introduction to electronics and since the simulators are integrated, it can also provide an introduction to mechanical work. The amount of energy required to perform dierent tasks can be compared and analyzed. |
 | Johansson, Tor Sterner: Applications of Advanced Physics in Visual Effects. Department of Computing Science, Umeå University, 2011. @mastersthesis{sterner2011applications,
title = {Applications of Advanced Physics in Visual Effects},
author = {Tor Sterner Johansson},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-48329
http://umu.diva-portal.org/smash/get/diva2:448459/FULLTEXT01.pdf},
year = {2011},
date = {2011-01-01},
school = {Department of Computing Science, Umeå University},
abstract = {AgX Multiphysics is a toolkit for performing physics-based simulations, developed by Algoryx Simulations AB. AgX provides stable physics simulations and is used for industrial and engineering simulations around the world.This thesis examines the possibilities for AgX to be used in the visual effects market for films and commercials. The thesis includes a survey of opinions of professionals from the visual effects company Digital Domain. The three most wanted capabilities from AgX was according to the survey; stiff constraints, fluid-rigid body interaction and hair simulation. Furthermore, all new tools must improve or be equal on all aspects compared to the old tools, and have good scalability.Several simulations were run to compare the stiff constraints and scalability of AgX with the currently used tools. The results show that AgX handles stiff constraints a lot better than the old tool and is also highly scalable.In summary, for saving time from doing tedius tasks and for using physics to an extent earlier not possible, AgX would be a good addition to the current use of physics in visual effects.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
AgX Multiphysics is a toolkit for performing physics-based simulations, developed by Algoryx Simulations AB. AgX provides stable physics simulations and is used for industrial and engineering simulations around the world.This thesis examines the possibilities for AgX to be used in the visual effects market for films and commercials. The thesis includes a survey of opinions of professionals from the visual effects company Digital Domain. The three most wanted capabilities from AgX was according to the survey; stiff constraints, fluid-rigid body interaction and hair simulation. Furthermore, all new tools must improve or be equal on all aspects compared to the old tools, and have good scalability.Several simulations were run to compare the stiff constraints and scalability of AgX with the currently used tools. The results show that AgX handles stiff constraints a lot better than the old tool and is also highly scalable.In summary, for saving time from doing tedius tasks and for using physics to an extent earlier not possible, AgX would be a good addition to the current use of physics in visual effects. |
 | Bäckman, Nils: Collision Detection of TriangleMeshes Using GPU. Department of Computing Science, Umeå University, Sweden, 2011. @mastersthesis{backman2011collision,
title = {Collision Detection of TriangleMeshes Using GPU},
author = {Nils Bäckman},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-40912
http://umu.diva-portal.org/smash/get/diva2:403566/FULLTEXT01.pdf},
year = {2011},
date = {2011-01-01},
school = {Department of Computing Science, Umeå University, Sweden},
abstract = {Collision detection in physics engines often use primitives such as spheres and boxes since collisions between these objects are straightforward to compute. More complicated objects can then be modeled using compounds of these simpler primitives.
However, in the pursuit of making it easier to construct and simulate complicated objects, triangle meshes are a good alternative since it is usually the format used by modeling tools.
This thesis demonstrates how triangle meshes can be used directly as collision objects within a physics engine. The collision detection is done using triangle mesh models with tests accelerated using a tree-based bounding volume hierarchy structure.
OpenCL is a new open industry framework for writing programs on heterogeneous platforms, including highly parallel platforms such as Graphics Processing Units(GPUs).
Through the use of OpenCL, parallelization of triangle mesh collision detection is implemented for the GPU, then evaluated and compared to the CPU implementation.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
Collision detection in physics engines often use primitives such as spheres and boxes since collisions between these objects are straightforward to compute. More complicated objects can then be modeled using compounds of these simpler primitives.
However, in the pursuit of making it easier to construct and simulate complicated objects, triangle meshes are a good alternative since it is usually the format used by modeling tools.
This thesis demonstrates how triangle meshes can be used directly as collision objects within a physics engine. The collision detection is done using triangle mesh models with tests accelerated using a tree-based bounding volume hierarchy structure.
OpenCL is a new open industry framework for writing programs on heterogeneous platforms, including highly parallel platforms such as Graphics Processing Units(GPUs).
Through the use of OpenCL, parallelization of triangle mesh collision detection is implemented for the GPU, then evaluated and compared to the CPU implementation. |
 | Lacoursière, Claude; Servin, Martin: Regularized multibody dynamics with dry frictional contacts. In: Euromech 2011: Nonsmooth contact and impact laws in mechanics, july 6th-8th 2011, Grenoble, 2011. @inproceedings{lacoursiere2011regularized,
title = {Regularized multibody dynamics with dry frictional contacts},
author = {Claude Lacoursière and Martin Servin},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-51119
http://umit.cs.umu.se/modsimcomplmech/docs/papers/euromech-nonsmooth-2011.pdf},
year = {2011},
date = {2011-01-01},
booktitle = {Euromech 2011: Nonsmooth contact and impact laws in mechanics, july 6th-8th 2011, Grenoble},
abstract = {The computation of contact forces for non-penetrating bodies subject to dry friction is particularly difficult. There is not even agreement on the correct analytic formulation of dry frictional contacts laws [1]. Our work in this field focuses on real-time simulation of heavy machines such as cranes, track and wheel loaders among others, for the purpose of operator training. Dry friction plays a central role in these, and contact forces are strongly coupled with stiff multibody systems. Performance and stability of the numerical methods are paramount. Direct solvers are often necessary because of the mass ratios involved and the need for fidelity. These are not scalable like iterative ones, and do not allow simple and intuitive implementations such as non-linear Gauss-Seidel relaxation methods. A unified framework including all aspects of the dynamics at the theoretical level, the time discretization, and the numerical solvers themselves is required, and this is what we present.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
The computation of contact forces for non-penetrating bodies subject to dry friction is particularly difficult. There is not even agreement on the correct analytic formulation of dry frictional contacts laws [1]. Our work in this field focuses on real-time simulation of heavy machines such as cranes, track and wheel loaders among others, for the purpose of operator training. Dry friction plays a central role in these, and contact forces are strongly coupled with stiff multibody systems. Performance and stability of the numerical methods are paramount. Direct solvers are often necessary because of the mass ratios involved and the need for fidelity. These are not scalable like iterative ones, and do not allow simple and intuitive implementations such as non-linear Gauss-Seidel relaxation methods. A unified framework including all aspects of the dynamics at the theoretical level, the time discretization, and the numerical solvers themselves is required, and this is what we present. |
 | Bodin, Kenneth; Lacoursière, Claude; Nilsson, Martin; Servin, Martin: Constraint based particle fluids on GPGPU. In: Particles 2011--ECCOMAS International Conference on Particle-based Methods, 26-28 October 2011, Barcelona, Spain, 2011. @inproceedings{bodin2011constraint,
title = {Constraint based particle fluids on GPGPU},
author = {Kenneth Bodin and Claude Lacoursière and Martin Nilsson and Martin Servin},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/constraintfluids_gpu.pdf},
year = {2011},
date = {2011-01-01},
booktitle = {Particles 2011--ECCOMAS International Conference on Particle-based Methods, 26-28 October 2011, Barcelona, Spain},
abstract = {We present a fluid simulation method adapted for stream parallelism on general purpose graphics processingunits (GPGPU). In this method the equations of Navier and Stokes are discretized using particles and kernelfunctions as in Smoothed Particle Hydrodynamics (SPH), but rather than using penalty methods or solving for a divergence free velocity field, incompressibility is enforced using holonomic kinematic constraints [1]. We useone constraint for each smoothed particle stating that the local density should be kept constant. Other constraintsare used for boundary conditions and multiphysics coupling. We also present a viscosity model in which theshear rate at each pseudo particle is constrained to satisfy a given constitutive law. The computation of theconstraint forces, namely, the pressure and the stresses, requires the solution system of linear equations whichhave a sparse, saddle point structure. These are solved using the Uzawa method of preconditioned conjugate gradients (CG) applied directly to the symmetric indefinite matrix. The overall simulation method has its rootsin a discrete variational principle and the SPOOK time stepping scheme for constrained mechanical systems [2].The SPOOK method is second order accurate on the positions and constraints violations, and is stable at largetime-steps, thus often allowing several orders of magnitude larger timesteps in our method compared to intraditional SPH methods. The numerical implementation on GPGPU that is the main result of this paper consistsof the following components: particle neighbour searches based on spatial decomposition; summation of kernel densities; construction of Jacobians representing the constraints on the density, boundary conditions, viscosityand multiphysics couplings; a Uzawa CG solver for the system of linear equations; and finally, discrete timestepping of velocities and positions. The CG solver is particularly suitable for stream computing since it is basedon matrix-vector multiplications. The sparse system data is stored in a compressed matrix format and the algorithms operating on this data on GPGPU are implemented in CUDA and OpenCL. Our simulation resultsinclude performance measurements, and validation of the method for benchmark problems. We achieve up totwo orders of magnitude speed-up from the GPGPU over traditional processors and together with the increased timestep efficiency of our method we arrive at interactive performance for systems with up to two million fluidparticles representing an incompressible fluid.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
We present a fluid simulation method adapted for stream parallelism on general purpose graphics processingunits (GPGPU). In this method the equations of Navier and Stokes are discretized using particles and kernelfunctions as in Smoothed Particle Hydrodynamics (SPH), but rather than using penalty methods or solving for a divergence free velocity field, incompressibility is enforced using holonomic kinematic constraints [1]. We useone constraint for each smoothed particle stating that the local density should be kept constant. Other constraintsare used for boundary conditions and multiphysics coupling. We also present a viscosity model in which theshear rate at each pseudo particle is constrained to satisfy a given constitutive law. The computation of theconstraint forces, namely, the pressure and the stresses, requires the solution system of linear equations whichhave a sparse, saddle point structure. These are solved using the Uzawa method of preconditioned conjugate gradients (CG) applied directly to the symmetric indefinite matrix. The overall simulation method has its rootsin a discrete variational principle and the SPOOK time stepping scheme for constrained mechanical systems [2].The SPOOK method is second order accurate on the positions and constraints violations, and is stable at largetime-steps, thus often allowing several orders of magnitude larger timesteps in our method compared to intraditional SPH methods. The numerical implementation on GPGPU that is the main result of this paper consistsof the following components: particle neighbour searches based on spatial decomposition; summation of kernel densities; construction of Jacobians representing the constraints on the density, boundary conditions, viscosityand multiphysics couplings; a Uzawa CG solver for the system of linear equations; and finally, discrete timestepping of velocities and positions. The CG solver is particularly suitable for stream computing since it is basedon matrix-vector multiplications. The sparse system data is stored in a compressed matrix format and the algorithms operating on this data on GPGPU are implemented in CUDA and OpenCL. Our simulation resultsinclude performance measurements, and validation of the method for benchmark problems. We achieve up totwo orders of magnitude speed-up from the GPGPU over traditional processors and together with the increased timestep efficiency of our method we arrive at interactive performance for systems with up to two million fluidparticles representing an incompressible fluid. |
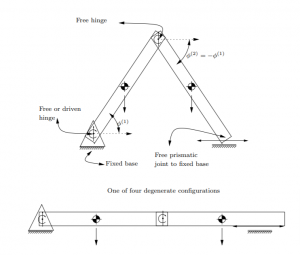 | Lacoursière, Claude; Linde, Mattias: Spook: a variational time-stepping scheme for rigid multibody systems subject to dry frictional contacts. Department of Computing Science, Umeå University, Sweden 2011. @techreport{lacoursiere2011spook,
title = {Spook: a variational time-stepping scheme for rigid multibody systems subject to dry frictional contacts},
author = {Claude Lacoursière and Mattias Linde},
url = {https://webapps.cs.umu.se/uminf/index.cgi?year=2011&number=9
https://webapps.cs.umu.se/uminf/reports/2011/009/part1.pdf},
year = {2011},
date = {2011-01-01},
journal = {UMINF report},
volume = {11},
institution = {Department of Computing Science, Umeå University, Sweden},
abstract = {The present work introduces a stable, semi-implicit, one stage integration scheme for rigid multibody systems subject to mixed holonomic and nonholonomic constraints as well as dry frictional impacts and contacts. A stable direct-iterative splitting scheme to solve the latter is also presented, and is shown to be suitable for real-time simulation of large multibody systems, such as those used for 3D graphics, simulation-based training systems. We use a Lagrangian framework in conjunction with the discrete-time D'Alembert's principle to introduce physically motivated singular perturbations which regularize and stabilize the numerical method. Lower bounds on the perturbations which guarantee numerical stability are provided, and their physical validity is demonstrated at the numerical level. The theoretical formulation uses massless ghost particles in the Lagrangians of mechanical systems. The coordinates and velocities of these converge strongly to Lagrange multipliers for holonomic and nonholonomic constraints, respectively, in the singular limit of zero relaxation. The ghost formulation allows for the systematic treatment of non-ideal, dissipative, constitutive laws such as Coulomb friction. A variational model for the latter is constructed and proven to be solvable in discrete time. Several splitting schemes are investigated mathematically and compared at the numerical level. Convergence and non-convergence properties of these are demonstrated mathematically and numerically.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {techreport}
}
The present work introduces a stable, semi-implicit, one stage integration scheme for rigid multibody systems subject to mixed holonomic and nonholonomic constraints as well as dry frictional impacts and contacts. A stable direct-iterative splitting scheme to solve the latter is also presented, and is shown to be suitable for real-time simulation of large multibody systems, such as those used for 3D graphics, simulation-based training systems. We use a Lagrangian framework in conjunction with the discrete-time D'Alembert's principle to introduce physically motivated singular perturbations which regularize and stabilize the numerical method. Lower bounds on the perturbations which guarantee numerical stability are provided, and their physical validity is demonstrated at the numerical level. The theoretical formulation uses massless ghost particles in the Lagrangians of mechanical systems. The coordinates and velocities of these converge strongly to Lagrange multipliers for holonomic and nonholonomic constraints, respectively, in the singular limit of zero relaxation. The ghost formulation allows for the systematic treatment of non-ideal, dissipative, constitutive laws such as Coulomb friction. A variational model for the latter is constructed and proven to be solvable in discrete time. Several splitting schemes are investigated mathematically and compared at the numerical level. Convergence and non-convergence properties of these are demonstrated mathematically and numerically. |
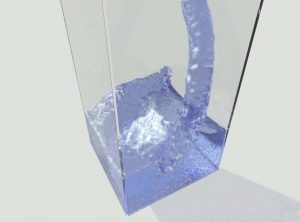 | Bodin, Kenneth; Lacoursière, Claude; Servin, Martin: Constraint fluids. In: IEEE Transactions on Visualization and Computer Graphics, vol. 18, no. 3, pp. 516–526, 2011. @article{bodin2011constraintb,
title = {Constraint fluids},
author = {Kenneth Bodin and Claude Lacoursière and Martin Servin},
url = {https://www.diva-portal.org/smash/get/diva2:316247/FULLTEXT02
https://www.youtube.com/watch?v=kzFam0UKFoA&ab_channel=Algoryx},
doi = {10.1109/TVCG.2011.29},
year = {2011},
date = {2011-01-01},
journal = {IEEE Transactions on Visualization and Computer Graphics},
volume = {18},
number = {3},
pages = {516--526},
publisher = {IEEE},
abstract = {We present a fluid simulation method based on Smoothed Particle Hydrodynamics (SPH) in which incompressibility and boundary conditions are enforced using holonomic kinematic constraints on the density. This formulation enables systematic multiphysics integration in which interactions are modeled via similar constraints between the fluid pseudoparticles and impenetrable surfaces of other bodies. These conditions embody Archimede's principle for solids and thus buoyancy results as a direct consequence. We use a variational time stepping scheme suitable for general constrained multibody systems we call SPOOK. Each step requires the solution of only one Mixed Linear Complementarity Problem (MLCP) with very few inequalities, corresponding to solid boundary conditions. We solve this MLCP with a fast iterative method. Overall stability is vastly improved in comparison to the unconstrained version of SPH, and this allows much larger time steps, and an increase in overall performance by two orders of magnitude. Proof of concept is given for computer graphics applications and interactive simulations.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
We present a fluid simulation method based on Smoothed Particle Hydrodynamics (SPH) in which incompressibility and boundary conditions are enforced using holonomic kinematic constraints on the density. This formulation enables systematic multiphysics integration in which interactions are modeled via similar constraints between the fluid pseudoparticles and impenetrable surfaces of other bodies. These conditions embody Archimede's principle for solids and thus buoyancy results as a direct consequence. We use a variational time stepping scheme suitable for general constrained multibody systems we call SPOOK. Each step requires the solution of only one Mixed Linear Complementarity Problem (MLCP) with very few inequalities, corresponding to solid boundary conditions. We solve this MLCP with a fast iterative method. Overall stability is vastly improved in comparison to the unconstrained version of SPH, and this allows much larger time steps, and an increase in overall performance by two orders of magnitude. Proof of concept is given for computer graphics applications and interactive simulations. |
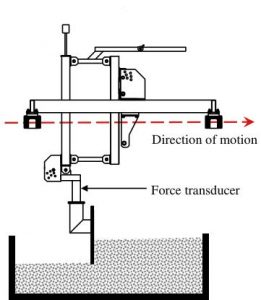 | Wan, Yijun: Discrete element method in granular material simulations. 2011. @mastersthesis{wan2011discrete,
title = {Discrete element method in granular material simulations},
author = {Yijun Wan},
url = {https://pure.tue.nl/ws/portalfiles/portal/47015912/716753-1.pdf},
year = {2011},
date = {2011-01-01},
journal = {Institute of Fraunhofer ITWM Kaiserslautern/Technical University of Kaiserslautern},
abstract = {This thesis describes the theories and simulations of granular material using discrete element method. With wide applications in agriculture and mechanical engineering, granular material exhibits a number of unique physical properties. The understanding of such properties is important in order to evaluate the performance of existing methodologies and to trigger the development of new models for different functionalities in the future. As a microscopic approach, discrete element method has been proved to be adequate in most simulations of granular material. An elaborated description is provided to illustrate a three-phase scheme from the fundamental discrete element model, which includes contact detection, force interaction and time integration. Additional to the conventional scheme, we present a bonding model with a connecting rod between each pair of contacted particles. Two enhanced bonding models are discussed in detail, with special characteristics in accordance with brittle and crack propagation features, respectively. On the contrary, continuum mechanical models give a macroscopic view to investigate granular material behaviors. Difficulties arise from the solving of a complex system of partial differential equations and the connections between model parameters and phenomenological ones. Moreover, triaxial test, uniaxial compression test and blade test are chosen as three representative experiments in granular material study. Simulation results implementing discrete element method are analyzed and discussed regarding the role of different parameters. By carefully choosing models and adjusting parameters, simulation results can have a good quantitative agreement with laboratory measurements. One of our kernel concerns is the computational complexity. Therefore, we focus on exploring effective simplified models with fewer variables.},
keywords = {External},
pubstate = {published},
tppubtype = {mastersthesis}
}
This thesis describes the theories and simulations of granular material using discrete element method. With wide applications in agriculture and mechanical engineering, granular material exhibits a number of unique physical properties. The understanding of such properties is important in order to evaluate the performance of existing methodologies and to trigger the development of new models for different functionalities in the future. As a microscopic approach, discrete element method has been proved to be adequate in most simulations of granular material. An elaborated description is provided to illustrate a three-phase scheme from the fundamental discrete element model, which includes contact detection, force interaction and time integration. Additional to the conventional scheme, we present a bonding model with a connecting rod between each pair of contacted particles. Two enhanced bonding models are discussed in detail, with special characteristics in accordance with brittle and crack propagation features, respectively. On the contrary, continuum mechanical models give a macroscopic view to investigate granular material behaviors. Difficulties arise from the solving of a complex system of partial differential equations and the connections between model parameters and phenomenological ones. Moreover, triaxial test, uniaxial compression test and blade test are chosen as three representative experiments in granular material study. Simulation results implementing discrete element method are analyzed and discussed regarding the role of different parameters. By carefully choosing models and adjusting parameters, simulation results can have a good quantitative agreement with laboratory measurements. One of our kernel concerns is the computational complexity. Therefore, we focus on exploring effective simplified models with fewer variables. |
2010
|
 | Bodin, Kenneth; Lacoursière, Claude; Servin, Martin: Method, an apparatus and computer program product for simulating dynamic fluids. 2010, (US Patent 8,762,117). @patent{bodin2014method,
title = {Method, an apparatus and computer program product for simulating dynamic fluids},
author = {Kenneth Bodin and Claude Lacoursière and Martin Servin},
url = {https://patents.google.com/patent/US8762117B2/pt-PT
https://patents.google.com/patent/US8762117B2/en
https://patentimages.storage.googleapis.com/38/bd/ef/3d9e47f70c46e3/US8762117.pdf
},
year = {2010},
date = {2010-05-26},
publisher = {Google Patents},
abstract = {The invention relates to a method for simulating dynamic fluids comprising a plurality of pseudo particles. The method comprising the steps of defining a fluid mass density of the pseudo particle masses; defining a mass density constraint such that the mass density on each pseudo particle is con strained to a reference mass density of a real fluid, whereby an instant propagation of density fluctuations through the entire fluid system is enabled; performing constraint stabilization on said mass density constraint using a time stepping function, wherein said time stepping function is arranged to conserve global physical symmetries and is stable for violations of said mass density constraint; solving a linear system of equations for said mass density constraint in order to calculate density constraint forces; calculating new time discrete pseudo particle Velocities from previous pseudo particle velocities with addition of velocity increments calculated from said density constraint forces; and calculating new time discrete pseudo particle positions from the previous pseudo particle positions with additions of the position increments
calculated from said new pseudo particle velocities. The invention also relates to an apparatus for simulating dynamic fluids and a computer program product for the same. },
note = {US Patent 8,762,117},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {patent}
}
The invention relates to a method for simulating dynamic fluids comprising a plurality of pseudo particles. The method comprising the steps of defining a fluid mass density of the pseudo particle masses; defining a mass density constraint such that the mass density on each pseudo particle is con strained to a reference mass density of a real fluid, whereby an instant propagation of density fluctuations through the entire fluid system is enabled; performing constraint stabilization on said mass density constraint using a time stepping function, wherein said time stepping function is arranged to conserve global physical symmetries and is stable for violations of said mass density constraint; solving a linear system of equations for said mass density constraint in order to calculate density constraint forces; calculating new time discrete pseudo particle Velocities from previous pseudo particle velocities with addition of velocity increments calculated from said density constraint forces; and calculating new time discrete pseudo particle positions from the previous pseudo particle positions with additions of the position increments
calculated from said new pseudo particle velocities. The invention also relates to an apparatus for simulating dynamic fluids and a computer program product for the same. |
 | Gunnarsson, Morgan: Robot Design Optimization by means of a Genetic Algorithm and Physics Simulation. 2010. @mastersthesis{gunnarsson2010robot,
title = {Robot Design Optimization by means of a Genetic Algorithm and Physics Simulation},
author = {Morgan Gunnarsson},
url = {http://umu.diva-portal.org/smash/record.jsf?pid=diva2%3A375435&dswid=-7990
http://umu.diva-portal.org/smash/get/diva2:375435/FULLTEXT01.pdf},
year = {2010},
date = {2010-01-01},
abstract = {This thesis presents a new robot design paradigm that utilizes evolutionary optimization techniques and advanced physics simulations. This technology makes it possible to design and test robots in virtual environments before the physical robots are built, which enables robot manufacturers to improve the performance of their products and decrease the time and cost for development. In this project, a 3D robot model was defined in geometric, kinematic and dynamic terms. Also, a piece of software was developed in C++ to optimize the robot design, and to simulate and visualize the robot model with the aid of a physics engine. A genetic algorithm was developed for the optimization and used to minimize the average positional error and the total torque magnitude under constraints on speed, and the design variables were the PID controller parameters and the torque actuator limits. Only predefined robots can be programmed and simulated with current software packages for offline-programming and robot simulation. It was concluded that such software packages can be improved by robot design optimization using the software developed in this project, by means of a genetic algorithm and simulations using a physics engine.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
This thesis presents a new robot design paradigm that utilizes evolutionary optimization techniques and advanced physics simulations. This technology makes it possible to design and test robots in virtual environments before the physical robots are built, which enables robot manufacturers to improve the performance of their products and decrease the time and cost for development. In this project, a 3D robot model was defined in geometric, kinematic and dynamic terms. Also, a piece of software was developed in C++ to optimize the robot design, and to simulate and visualize the robot model with the aid of a physics engine. A genetic algorithm was developed for the optimization and used to minimize the average positional error and the total torque magnitude under constraints on speed, and the design variables were the PID controller parameters and the torque actuator limits. Only predefined robots can be programmed and simulated with current software packages for offline-programming and robot simulation. It was concluded that such software packages can be improved by robot design optimization using the software developed in this project, by means of a genetic algorithm and simulations using a physics engine. |
 | Sundholm, Erik: Distance Fields Accelerated with OpenCL. Department of Computing Science, Umeå University, Sweden, 2010. @mastersthesis{sundholm2010distance,
title = {Distance Fields Accelerated with OpenCL},
author = {Erik Sundholm},
url = {http://umu.diva-portal.org/smash/record.jsf?pid=diva2:327072
http://umu.diva-portal.org/smash/get/diva2:327072/FULLTEXT01.pdf},
year = {2010},
date = {2010-01-01},
school = {Department of Computing Science, Umeå University, Sweden},
abstract = {An important task in any graphical simulation is the collision detection between the objects in the simulation. It is desirable to have a good general method for collision detection with high performance. This thesis describes an implementation of a collision detection method that uses distance fields to detect collisions. This method is quite robust and able to detect collisions between most possible shapes. It is also capable of computing contact data for collisions. A problem with distance fields is that the performance cost for making a distance field is quite extensive. It is therefore customary to have some way of accelerating the computation of the distance field (usually by only computing select parts of the field). The application implemented in this thesis solves this performance problem by using the parallel framework OpenCL for accelerating the construction of the field.OpenCL enables programmers to execute code on the GPU. The GPU is highly data parallel and a huge increase in performance can be obtained by letting the GPU handle the computations associated with the initiation of the field.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
An important task in any graphical simulation is the collision detection between the objects in the simulation. It is desirable to have a good general method for collision detection with high performance. This thesis describes an implementation of a collision detection method that uses distance fields to detect collisions. This method is quite robust and able to detect collisions between most possible shapes. It is also capable of computing contact data for collisions. A problem with distance fields is that the performance cost for making a distance field is quite extensive. It is therefore customary to have some way of accelerating the computation of the distance field (usually by only computing select parts of the field). The application implemented in this thesis solves this performance problem by using the parallel framework OpenCL for accelerating the construction of the field.OpenCL enables programmers to execute code on the GPU. The GPU is highly data parallel and a huge increase in performance can be obtained by letting the GPU handle the computations associated with the initiation of the field. |
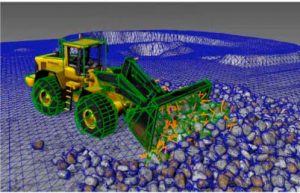 | Lacoursière, Claude; Servin, Martin; Backman, Anders: Fast and stable simulation of granular matter and machines. In: Proceedings of the Fifth International Conference on Discrete Element Methods (DEM5), Citeseer 2010. @inproceedings{lacoursiere2010fast,
title = {Fast and stable simulation of granular matter and machines},
author = {Claude Lacoursière and Martin Servin and Anders Backman},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/faststable2010.pdf},
year = {2010},
date = {2010-01-01},
booktitle = {Proceedings of the Fifth International Conference on Discrete Element Methods (DEM5)},
organization = {Citeseer},
abstract = {We present mathematical models and numerical techniques designed to address the challenges of real-time simulator training for earth moving equipment involving heavy vehicles and granular matter. The same techniques have also been applied to mix granular matter with a nearly incompressible SPH model of water.
The central elements in our technique are a unified model based on constrained multibody systems including point particles and rigid bodies, a dynamic resolution technique based on merging and splitting elementary bodies. The numerical integration is based on a time-discrete variational formulation of analytic mechanics, which is closely related to the Rattle and Shake [3] solvers. We have modified these by introducing stabilized linear approximations to avoid solving the nonlinear equations exactly [5]. Frictional contact forces are modeled using a linear complementarity (LCP) formulations similar to those already well-known in this field [8]. Our deviation from these models is mainly in the solution technique, which mixes a direct LCP solver for computing normal forces and a Gauss-Seidel (GS) process to solve for the frictional ones. The SPH model includes kinematic constraints for incompressibility and for the boundary conditions. The latter are formulated as non-penetration conditions producing also buoyancy for immersed bodies. Another novelty of our overall method is the introduction of dynamic resolution using a merge-split technique based on local analysis of contact forces and complementarity conditions. A significant result is the real-time simulation of a tractor, which can shovel granular matter consisting of moderately small elements integrated in an interactive 3D application used for operator training. The conventional computational techniques for granular materials are based either on modeling the system as distinct particles [7] or using continuum mechanics with specific constitutive laws for granular matter and discretization using finite elements or mesh-free methods. In turn, the discrete element techniques are phrased either as penalty methods, e.g., the Hertz contact model, requiring very small time steps. Complementarity formulations of contact models solved using Gauss-Seidel iterations [9] can use larger time steps, but have slow, linear convergence. By contrast, interactive applications put strong constraints on speed and time steps. There are usually roughly 10 milliseconds to compute a 1/60 second update. With this budget, there is usually only time for a single step with size h = 1/60 s. In turn the stable simulation of machines demands precise solutions to maintain stability.
One additional reason for the choice of our integration method is that it is solidly anchored in discrete time mechanics and is in fact much more stable than higher order explicit methods. It is also necessary to explicitly compute the Lagrange multipliers with good precision, using a direct method for the most part, or with a good preconditioner. Our experience has shown that neither explicit penalty methods nor GS based solver can be tuned to provide sufficient stability. },
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
We present mathematical models and numerical techniques designed to address the challenges of real-time simulator training for earth moving equipment involving heavy vehicles and granular matter. The same techniques have also been applied to mix granular matter with a nearly incompressible SPH model of water.
The central elements in our technique are a unified model based on constrained multibody systems including point particles and rigid bodies, a dynamic resolution technique based on merging and splitting elementary bodies. The numerical integration is based on a time-discrete variational formulation of analytic mechanics, which is closely related to the Rattle and Shake [3] solvers. We have modified these by introducing stabilized linear approximations to avoid solving the nonlinear equations exactly [5]. Frictional contact forces are modeled using a linear complementarity (LCP) formulations similar to those already well-known in this field [8]. Our deviation from these models is mainly in the solution technique, which mixes a direct LCP solver for computing normal forces and a Gauss-Seidel (GS) process to solve for the frictional ones. The SPH model includes kinematic constraints for incompressibility and for the boundary conditions. The latter are formulated as non-penetration conditions producing also buoyancy for immersed bodies. Another novelty of our overall method is the introduction of dynamic resolution using a merge-split technique based on local analysis of contact forces and complementarity conditions. A significant result is the real-time simulation of a tractor, which can shovel granular matter consisting of moderately small elements integrated in an interactive 3D application used for operator training. The conventional computational techniques for granular materials are based either on modeling the system as distinct particles [7] or using continuum mechanics with specific constitutive laws for granular matter and discretization using finite elements or mesh-free methods. In turn, the discrete element techniques are phrased either as penalty methods, e.g., the Hertz contact model, requiring very small time steps. Complementarity formulations of contact models solved using Gauss-Seidel iterations [9] can use larger time steps, but have slow, linear convergence. By contrast, interactive applications put strong constraints on speed and time steps. There are usually roughly 10 milliseconds to compute a 1/60 second update. With this budget, there is usually only time for a single step with size h = 1/60 s. In turn the stable simulation of machines demands precise solutions to maintain stability.
One additional reason for the choice of our integration method is that it is solidly anchored in discrete time mechanics and is in fact much more stable than higher order explicit methods. It is also necessary to explicitly compute the Lagrange multipliers with good precision, using a direct method for the most part, or with a good preconditioner. Our experience has shown that neither explicit penalty methods nor GS based solver can be tuned to provide sufficient stability. |
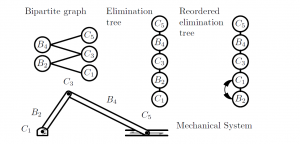 | Lacoursière, Claude; Linde, Mattias; Sabelström, Olof: Direct sparse factorization of blocked saddle point matrices. In: International Workshop on Applied Parallel Computing, pp. 324–335, Springer, Berlin, Heidelberg 2010. @inproceedings{lacoursiere2010direct,
title = {Direct sparse factorization of blocked saddle point matrices},
author = {Claude Lacoursière and Mattias Linde and Olof Sabelström},
url = {http://umu.diva-portal.org/smash/record.jsf?pid=diva2%3A572327&dswid=-5578},
doi = {10.1007/978-3-642-28145-7_32},
year = {2010},
date = {2010-01-01},
booktitle = {International Workshop on Applied Parallel Computing},
pages = {324--335},
organization = {Springer, Berlin, Heidelberg},
abstract = {We present a parallel algorithm for the direct factorization of sparse saddle-point matrices of moderate size coming from real-time multibody dynamics simulations. We used the specific structure of these problems both for a priori construction of supernodes and to avoid all dynamic permutations during factorization. For the latter, we present a technique we call “leaf swapping” which performs permutations of the supernodes in the elimination tree without any reference to numerical values. The results compare favorably with currently available high performance codes on our problem sets because of the high overhead necessary to process very large problems on increasingly complex supercomputers.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
We present a parallel algorithm for the direct factorization of sparse saddle-point matrices of moderate size coming from real-time multibody dynamics simulations. We used the specific structure of these problems both for a priori construction of supernodes and to avoid all dynamic permutations during factorization. For the latter, we present a technique we call “leaf swapping” which performs permutations of the supernodes in the elimination tree without any reference to numerical values. The results compare favorably with currently available high performance codes on our problem sets because of the high overhead necessary to process very large problems on increasingly complex supercomputers. |
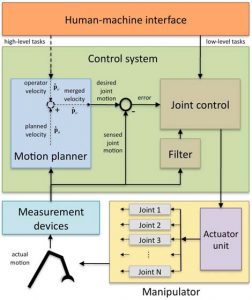 | Hansson, Anders; Servin, Martin: Semi-autonomous shared control of large-scale manipulator arms. In: Control Engineering Practice, vol. 18, no. 9, pp. 1069–1076, 2010. @article{hansson2010semi,
title = {Semi-autonomous shared control of large-scale manipulator arms},
author = {Anders Hansson and Martin Servin},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/semiautonomous_cep_2010.pdf
},
doi = {10.1016/j.conengprac.2010.05.015},
year = {2010},
date = {2010-01-01},
journal = {Control Engineering Practice},
volume = {18},
number = {9},
pages = {1069--1076},
publisher = {Elsevier},
abstract = {Semi-autonomous operation with shared control between the human operator and control computer has been developed and examined for a large-scalemanipulator for gripping and lifting heavy objects in unstructured dynamical environments. The technique has been implemented on a electro-hydraulic actuated crane arm with redundant kinematic structure. Several modes of automation and interaction were evaluated. Experiments show satisfactory smoothness in the transitions between autonomous, shared and manual control, doubled performance in log loading for inexperienced operators while experienced operators reported reduced workload.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
Semi-autonomous operation with shared control between the human operator and control computer has been developed and examined for a large-scalemanipulator for gripping and lifting heavy objects in unstructured dynamical environments. The technique has been implemented on a electro-hydraulic actuated crane arm with redundant kinematic structure. Several modes of automation and interaction were evaluated. Experiments show satisfactory smoothness in the transitions between autonomous, shared and manual control, doubled performance in log loading for inexperienced operators while experienced operators reported reduced workload. |
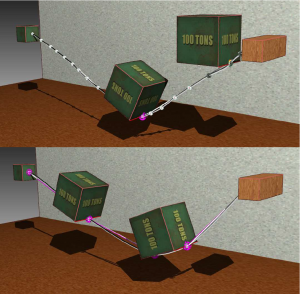 | Servin, Martin; Lacoursière, Claude; Nordfelth, Fredrik; Bodin, Kenneth: Hybrid, multiresolution wires with massless frictional contacts. In: IEEE transactions on visualization and computer graphics, vol. 17, no. 7, pp. 970–982, 2010. @article{servin2010hybrid,
title = {Hybrid, multiresolution wires with massless frictional contacts},
author = {Martin Servin and Claude Lacoursière and Fredrik Nordfelth and Kenneth Bodin},
url = {https://www.youtube.com/watch?v=H8Xbtl7jX-k
http://www.diva-portal.org/smash/get/diva2:317085/FULLTEXT02.pdf
},
doi = {10.1109/TVCG.2010.122},
year = {2010},
date = {2010-01-01},
journal = {IEEE transactions on visualization and computer graphics},
volume = {17},
number = {7},
pages = {970--982},
publisher = {IEEE},
abstract = {We describe a method for the visual interactive simulation of wires contacting with rigid multibodies. The physical model used is a hybrid combining lumped elements and massless quasistatic representations. The latter is based on a kinematic constraint preserving the total length of the wire along a segmented path which can involve multiple bodies simultaneously and dry frictional contact nodes used for roping, lassoing, and fastening. These nodes provide stick and slide friction along the edges of the contacting geometries. The lumped element resolution is adapted dynamically based on local stability criteria, becoming coarser as the tension increases, and up to the purely kinematic representation. Kinematic segments and contact nodes are added, deleted, and propagated based on contact geometries and dry friction configurations. The method gives a dramatic increase in both performance and robustness because it quickly decimates superfluous nodes without loosing stability, yet adapts to complex configurations with many contacts and high curvature, keeping a fixed, large integration time step. Numerical results demonstrating the performance and stability of the adaptive multiresolution scheme are presented along with an array of representative simulation examples illustrating the versatility of the frictional contact model.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {article}
}
We describe a method for the visual interactive simulation of wires contacting with rigid multibodies. The physical model used is a hybrid combining lumped elements and massless quasistatic representations. The latter is based on a kinematic constraint preserving the total length of the wire along a segmented path which can involve multiple bodies simultaneously and dry frictional contact nodes used for roping, lassoing, and fastening. These nodes provide stick and slide friction along the edges of the contacting geometries. The lumped element resolution is adapted dynamically based on local stability criteria, becoming coarser as the tension increases, and up to the purely kinematic representation. Kinematic segments and contact nodes are added, deleted, and propagated based on contact geometries and dry friction configurations. The method gives a dramatic increase in both performance and robustness because it quickly decimates superfluous nodes without loosing stability, yet adapts to complex configurations with many contacts and high curvature, keeping a fixed, large integration time step. Numerical results demonstrating the performance and stability of the adaptive multiresolution scheme are presented along with an array of representative simulation examples illustrating the versatility of the frictional contact model. |
2009
|
 | Nilsson, Martin: Constraint Fluids on GPU. Department of Computing Science, Umeå University, Sweden, 2009. @mastersthesis{nilsson2009constraint,
title = {Constraint Fluids on GPU},
author = {Martin Nilsson},
url = {http://www8.cs.umu.se/education/examina/Rapporter/MartinNilsson.pdf
https://www.algoryx.se/mainpage/wp-content/uploads/2021/04/MartinNilsson.pdf
https://www.youtube.com/watch?v=0e3p5iu3zj8&t=1s&ab_channel=Algoryx},
year = {2009},
date = {2009-01-01},
publisher = {Citeseer},
school = {Department of Computing Science, Umeå University, Sweden},
abstract = {The processing power of graphics hardware has increased tremendously in the last several years and they are therefore used more and more outside of their intended domain of graphics rendering. This thesis describes the implementation and results of a fluid simulator, using the constraint fluid method, which harnesses the processing power of modern GPUs, in particular NVIDIA’s CUDA platform. As demonstrated in this thesis, particle systems with hundreds of thousands of particles can be simulated and visualized at interactive rates and systems containing up to a million particles can be run at a few frames per second. The biggest performance bottleneck is currently in the solver, in particular the lack of a working preconditioned Conjugate Gradient implementation.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {mastersthesis}
}
The processing power of graphics hardware has increased tremendously in the last several years and they are therefore used more and more outside of their intended domain of graphics rendering. This thesis describes the implementation and results of a fluid simulator, using the constraint fluid method, which harnesses the processing power of modern GPUs, in particular NVIDIA’s CUDA platform. As demonstrated in this thesis, particle systems with hundreds of thousands of particles can be simulated and visualized at interactive rates and systems containing up to a million particles can be run at a few frames per second. The biggest performance bottleneck is currently in the solver, in particular the lack of a working preconditioned Conjugate Gradient implementation. |
 | Bodin, Madelen: Creative interactive environment for doing physics. In: MPTL 14, University of Udine, Italy, 23-25 September 2009, 2009. @inproceedings{bodin2009creative,
title = {Creative interactive environment for doing physics},
author = {Madelen Bodin},
url = {http://urn.kb.se/resolve?urn=urn%3Anbn%3Ase%3Aumu%3Adiva-53290
http://www.fisica.uniud.it/URDF/mptl14/ftp/Booklet%20MPTL14.pdf},
year = {2009},
date = {2009-01-01},
booktitle = {MPTL 14, University of Udine, Italy, 23-25 September 2009},
abstract = {The Algodoo 2D simulation environment is built upon advanced real-time physicssimulation technology. (Demonstration video is provided on Youtube:http://www.youtube.com/watch?v=qa9xn-xYQQk) It has a graphical user interface whichmakes it possible for anybody to create and explore scenes that are physicallyinteractive. In Algodoo it is possible to create and edit scenes using simple drawingtools, save and load scenes, start and stop simulation, interact with simulation byclick, drag, tilt and shake. Color traces, force and velocity vectors can be addedfor enhanced visualization. The built-in physics simulation engines treat rigidbodies, fluids, chains, gears, gravity, contacts, friction, restitution, springs,hinges, lock, motors and also laser rays and optics. Algodoo is based on highlycompetitive technologies for interactive multiphysics simulation, includingvariational mechanical integrators and high performance numerical methods. Algodoo isparticularly intended to be used in order to encourage and make use of the students’own creativity in order to construct knowledge and giving the student a sense ofownership of their own learning. The sense of having control of the learningsituation is considered being one of the most important factors that generatemotivational behaviour. Algodoo offers new strategies for working with computers inteaching and learning physics. This study demonstrates the use of Algodoo withteacher students in physics and also with 8-9 year old girls in a science class.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {inproceedings}
}
The Algodoo 2D simulation environment is built upon advanced real-time physicssimulation technology. (Demonstration video is provided on Youtube:http://www.youtube.com/watch?v=qa9xn-xYQQk) It has a graphical user interface whichmakes it possible for anybody to create and explore scenes that are physicallyinteractive. In Algodoo it is possible to create and edit scenes using simple drawingtools, save and load scenes, start and stop simulation, interact with simulation byclick, drag, tilt and shake. Color traces, force and velocity vectors can be addedfor enhanced visualization. The built-in physics simulation engines treat rigidbodies, fluids, chains, gears, gravity, contacts, friction, restitution, springs,hinges, lock, motors and also laser rays and optics. Algodoo is based on highlycompetitive technologies for interactive multiphysics simulation, includingvariational mechanical integrators and high performance numerical methods. Algodoo isparticularly intended to be used in order to encourage and make use of the students’own creativity in order to construct knowledge and giving the student a sense ofownership of their own learning. The sense of having control of the learningsituation is considered being one of the most important factors that generatemotivational behaviour. Algodoo offers new strategies for working with computers inteaching and learning physics. This study demonstrates the use of Algodoo withteacher students in physics and also with 8-9 year old girls in a science class. |
| Bodin, Kenneth; Lacoursière, Claude; Servin, Martin: Method for simulating dynamic incompressible fluids using particle based spatial discretization and mass density constraints. 2009. @patent{bodin2009method,
title = {Method for simulating dynamic incompressible fluids using particle based spatial discretization and mass density constraints},
author = {Kenneth Bodin and Claude Lacoursière and Martin Servin},
year = {2009},
date = {2009-01-01},
abstract = {Disclosed is a method of simulating dynamic fluids comprising a set of pseudo particles usedto represent physical quantities of the fluid, a fluid density computed from a weightedaverage over the pseudo particle, and a density constraint on the fluid density constraining itto be incompressible with the reference density of a real physical fluid that is modeled. Theconstraint stabilization forces of the density constraint govern the dynamics of the pseudoparticles and the simulated fluid. The method comprises a combined time stepping andconstraint stabilization and relaxation method that provides global conservation of physicalsymmetries and therefore robust physical and numerical stability under large constraintviolation, and substantial improvement in efficiency over other known methods.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {patent}
}
Disclosed is a method of simulating dynamic fluids comprising a set of pseudo particles usedto represent physical quantities of the fluid, a fluid density computed from a weightedaverage over the pseudo particle, and a density constraint on the fluid density constraining itto be incompressible with the reference density of a real physical fluid that is modeled. Theconstraint stabilization forces of the density constraint govern the dynamics of the pseudoparticles and the simulated fluid. The method comprises a combined time stepping andconstraint stabilization and relaxation method that provides global conservation of physicalsymmetries and therefore robust physical and numerical stability under large constraintviolation, and substantial improvement in efficiency over other known methods. |
2008
|
 | Hansson, Anders; Servin, Martin: Semi-autonomous Shared Control for Redundant Forwarder Cranes. Umeå Universitet 2008. @techreport{semiauto_servin2008,
title = {Semi-autonomous Shared Control for Redundant Forwarder Cranes},
author = {Anders Hansson and Martin Servin},
url = {http://umit.cs.umu.se/modsimcomplmech/docs/papers/Hansson_Servin_Semi-autonomous%20Shared%20Control%20for%20Redundant%20Forwarder%20Cranes.pdf
http://umit.cs.umu.se/wiki/Semi-Autonomous_Crane
https://www.youtube.com/watch?v=OHj97eEGfxs&ab_channel=UMITResearchLab},
year = {2008},
date = {2008-06-01},
institution = {Umeå Universitet},
abstract = {Semi-autonomous operation with shared control between the human operator and an autonomous control system has been developed and examined for a forwarder crane. Shared control gives the operator and the autonomous control system simultaneous control over the same task. It also enables smooth transitions between manual and autonomous operation. Operators with professional experience of forwarder crane control as well as inexperienced operators have been engaged in experiments where performance was measured. The experiments were conducted on a forwarder crane of reduced size at Smart Crane Lab, Umeå University. Three levels of automation were evaluated: pure manual operation, semi{autonomous operation with traded control and semi{autonomous operation with shared control. The semi-autonomous operation were examined along with two methods for manual operation: conventional joint control and boom-tip control.
The time-efficiency of log loading as well as smoothness of transitions between autonomous and manual operation were examined. The experiments show that with the aid of shared control the performance of the inexperienced operators increases with a factor two as compared to manual joint control. The performance of the professional operators decreases somewhat with shared control as compared to manual joint control. With shared control both professional and inexperienced operators experience a reduction in workload. Smoothness of transitions were found satisfactory.},
keywords = {Algoryx},
pubstate = {published},
tppubtype = {techreport}
}
Semi-autonomous operation with shared control between the human operator and an autonomous control system has been developed and examined for a forwarder crane. Shared control gives the operator and the autonomous control system simultaneous control over the same task. It also enables smooth transitions between manual and autonomous operation. Operators with professional experience of forwarder crane control as well as inexperienced operators have been engaged in experiments where performance was measured. The experiments were conducted on a forwarder crane of reduced size at Smart Crane Lab, Umeå University. Three levels of automation were evaluated: pure manual operation, semi{autonomous operation with traded control and semi{autonomous operation with shared control. The semi-autonomous operation were examined along with two methods for manual operation: conventional joint control and boom-tip control.
The time-efficiency of log loading as well as smoothness of transitions between autonomous and manual operation were examined. The experiments show that with the aid of shared control the performance of the inexperienced operators increases with a factor two as compared to manual joint control. The performance of the professional operators decreases somewhat with shared control as compared to manual joint control. With shared control both professional and inexperienced operators experience a reduction in workload. Smoothness of transitions were found satisfactory. |
