A new paper titled “Time Variable Minimum Torque Trajectory Optimization for Autonomous Excavator” reports research conducted by Yajue Yang, Jia Pan, Pinxin Long, Xibin Song, and Liangjun Zhang from the City University of Hong Kong, the University of Hong Kong and the Robotics and Auto-Driving Lab, at Baidu Research.
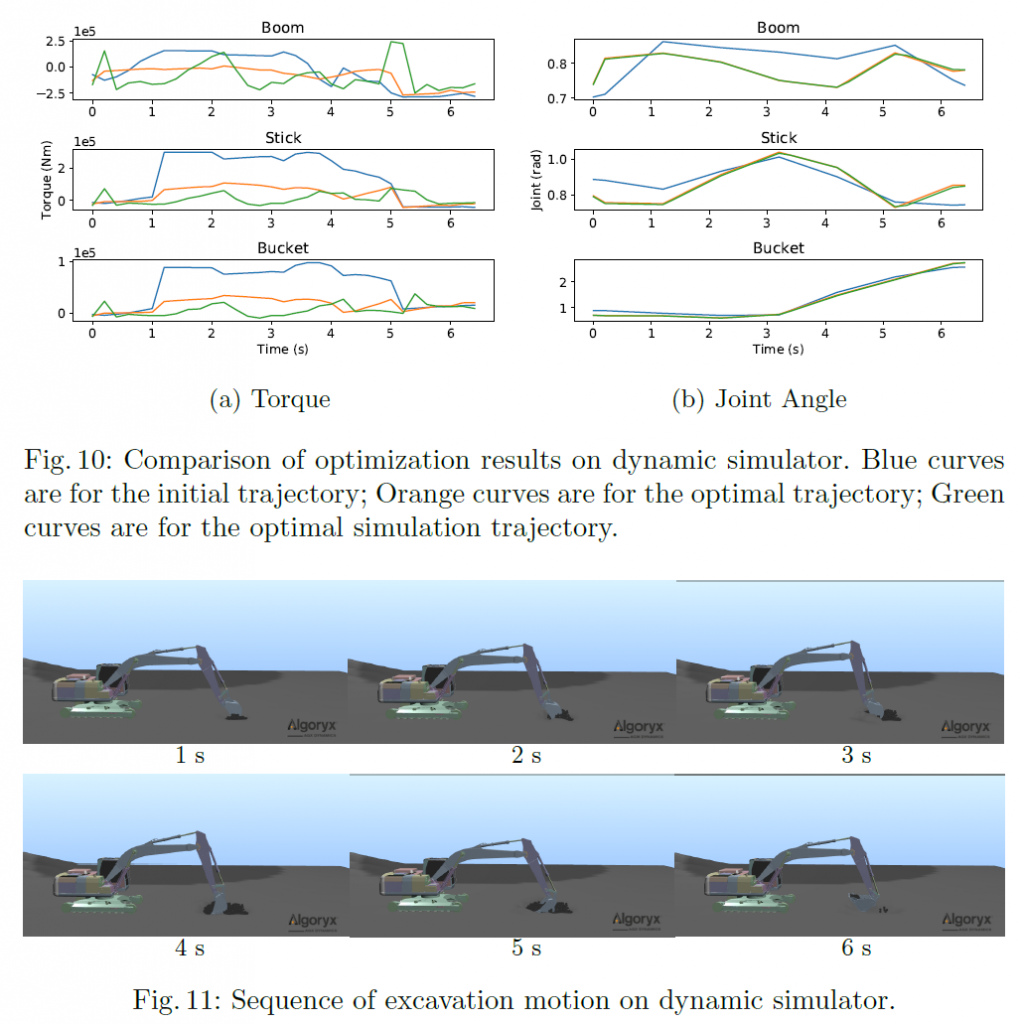
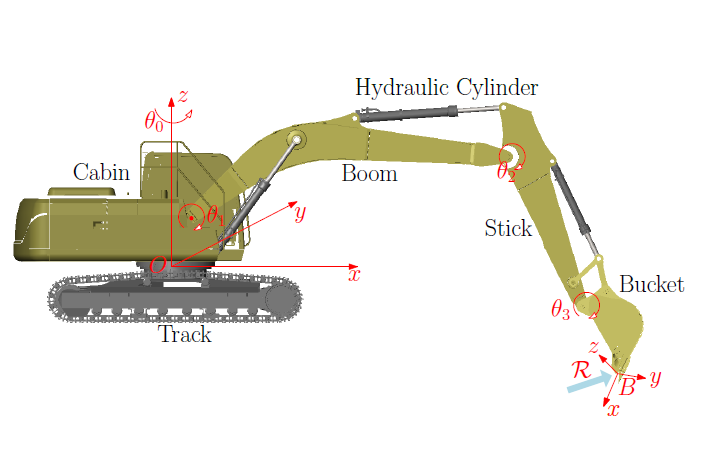
AGX Dynamics was used to set up a mechanical simulation of an excavator operating in terrain. They used the simulation to compute the minimum torques for obtaining time optimal trajectories for excavation in different soil types. Their results will be used for designing control systems for autonomous excavation.
At Algoryx, we see a strong trend to use simulations in the development of autonomous machines. Fidelity, stability and high transfer from simulation to reality are important factors, as well as ease of use and a high degree of creative freedom for the engineers.
Read more about this project in their research paper: https://arxiv.org/abs/2006.00811