
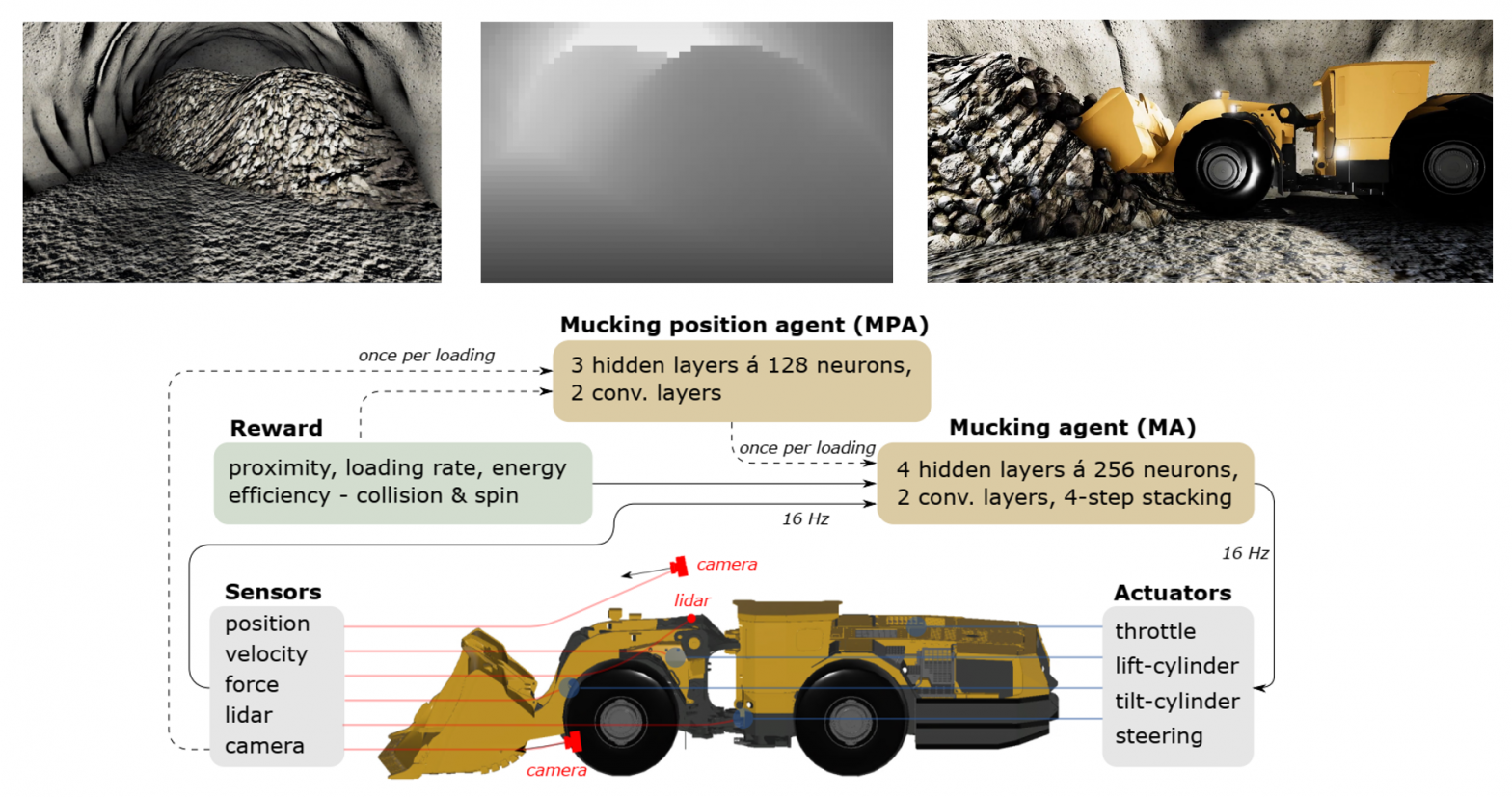
Update April 13 2022: This paper was awarded Editors’ Choice Article as noteworthy or likely to be of high interest to readers, and comprise key papers that highlight some of the best current research published in Machines. Automatic control of a wheel loader doing bucket filling can be solved using deep reinforcement learning. This was […]
Author Archives: Martin Servin
Towards self-loading forest machines
Researchers and engineers at Algoryx and Umeå University present the first successful implementation of a reinforcement learning controlled forestry machine at IROS 2021.